
- Home
- OKIの技術
- 技術広報誌 OKIテクニカルレビュー
- No.240
- 空港映像認識による遠隔での情報把握/提供ソリューション
技術広報誌 OKIテクニカルレビュー
くらしを支えるDX
- 本記事のリーフレット
空港映像認識による遠隔での情報把握/提供ソリューション
従来からOKIは国土交通省航空局殿(以下、航空局殿)に音声による管制通信システム(参考文献1)を納入し、運用されている。新管制卓システムの調査で海外では空港管制を遠隔地からリモート化する動きがあることが分かった(参考文献2)。空港をリモート化するイメージを図1に示す。空港管制を遠隔から制御するためには、映像を遠隔地に伝送するのみではなく、動体(航空機)の検知や追尾といった機能が必要となり、そのための研究開発を重ねてきた。国内でも航空局殿により空港での業務実施をリモート化する案件が仕様化され、OKIの研究開発成果としてシステム(RVA-19型遠隔管制塔装置、以下遠隔管制装置)の受注へとつながった(参考文献3)。
遠隔管制装置は、航空管制官が配置されていない空港(RADIO空港)の管制塔から見た映像及び業務に必要な情報を、遠隔地にいる航空管制運航情報官に提供するシステムである。また、航空機を検知・追尾する処理により、運用者の業務を支援する機能をもつ。
本稿ではこの遠隔管制塔装置の映像関連装置及び動体検知/追尾の課題と対応を紹介する。
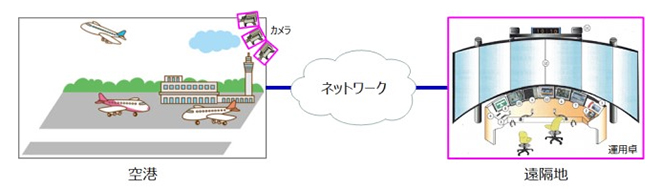
図1 空港のリモート化
映像関連装置と動体検知/追尾の概要
(1)映像関連装置
遠隔管制塔装置での映像関連装置系統概要を図2に示す。
①固定カメラ
空港に設置した固定カメラの映像を遠隔地の大型ディスプレーにリアルタイムで表示させ、遠隔地で空港と同等の視野確保を可能とする。なお、カメラ映像はFull HD(注1)、30FPS(注2)とする。
②可動カメラ
可動カメラは、P,T(注3)機能を持つ旋回台とZoom機能を持つカメラの組合せで構成する。
従来の空港管制での双眼鏡を代替する装置として可動カメラを空港に設置し、遠隔地から空港及び空港周辺の動体追尾を行うことを可能とする。
(2)動体検知・追尾機能
①動体検知
固定カメラの映像から動体を検知し、動体の周囲に検知枠を付与し、動体を容易に認識可能とする。
②動体追尾
遠隔地から指定した動体を可動カメラで自動追尾し、拡大視認を可能とする。なお、自動追尾する際は、動体に追尾枠を付与する。
映像関連装置開発上の課題
映像関連装置の開発にあたっては、さまざまな課題があったが、特に注力した内容を以下に示す。
(1)カメラ映像による動体検知
①なめらかな検知枠表示
Full HD、30FPSの映像に対してリアルタイムに動体検知をする必要があるが、5回/秒程度の検知処理しかできず、動体に検知枠をなめらかに付与することができなかった。
②小さな動体の検知
空港のリモート化では、日中帯の晴天時に遠方先までの航空機を検知できることが必要であるが、遠方先の小さく表示される動体(航空機)はFull HDの映像ではピクセル数が少なく、検知は困難であった。
(2)カメラ映像による動体の追尾
①動体追尾性能
動体追尾処理が動体の大きさを正しく把握できないことで、動体の周辺景色もあわせて動体と誤認識してしまい、動体を追尾できないケースがあった。
②旋回台の制御
可動カメラを取り付ける旋回台の「P,T制御命令」の受付周期は最大100ms以上となり、可動カメラ制御装置が動体の現在地を認識してから動体追尾用のPTZ(注3)制御命令を可動カメラに送信できるまでは、命令の受付周期分のタイムラグが生じる。そのため、動体によっては追尾が遅れてしまう。
③座標の変換
可動カメラのP,T情報を画面上のX,Y座標に変換する際の誤差により、動体の追尾枠がずれてしまう。
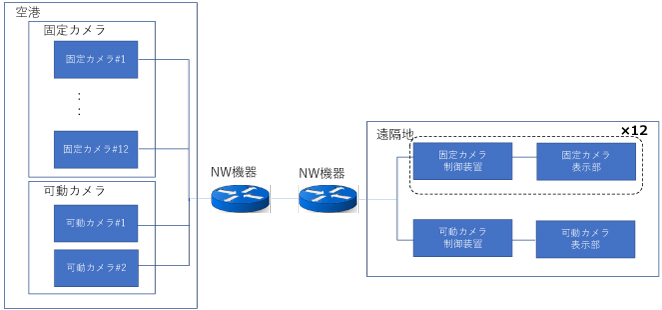
図2 映像関連装置の系統図
動体検知/追尾の課題への対応
前述した開発の課題に対し、さまざまな試行錯誤を行い、課題の解決策を導いた。その内容を以下に述べる。
(1)カメラ映像による動体の検知
①なめらかな検知枠表示
動体検知に用いるアルゴリズムの各種パラメータを改善することで処理性能を向上させ、30回/秒の検知枠表示処理を実現した。その結果、動体に検知枠をなめらかに付与できるようになった。
②小さな動体の検知
映像フレームごとの画像差分をもとに動体を検知する処理に加えて、ピクセル数が少ない動体を検知できるように、映像処理で物体を際立たせる処理を実装した。その結果、遠方先に小さく表示される物体(航空機)を検知できるようになった。
(2)カメラ映像による動体の追尾
①動体追尾性能
Deep Learningにより物体のさまざまな形状を固定カメラ制御装置に学習させたことで、物体の大きさを正しく把握できるようになった。その結果、動体の周辺景色もあわせて動体と誤認識することがなくなり、動体を正しく追尾できるようになった。
②旋回台の制御
動体の移動先を予測するアルゴリズムを開発した。稼働カメラには動体の現在位置ではなく移動先の予測位置に対するPTZ制御命令を送信することで、動体への追尾に遅れが生じないようにした。
③座標の変換
可動カメラのP,T情報を画面上のX,Y座標に変換する際に、試行錯誤を繰り返し、変換の精度を向上させ、動体の追尾枠がずれないことを実現した。
あとがき
本動体検知/追尾技術を採用した装置は既に航空局殿で運用されている。写真1に遠隔地側の装置、写真2に空港側のカメラを示す。今後は使用者様の意見を基に、さらに試行錯誤を行い、より使い勝手の良い装置にしていく。

写真1 遠隔地側の装置
写真2 空港側のカメラ(太枠部分に設置)
参考文献
(参考文献1)西貝公男、堀越貴之:新管制卓システム、OKIテクニカルレビュー226号、Vol.82 No.2、pp.24-27、2015年12月
(参考文献2)EUROCAE ED-240A「MINIMUM AVIATION SYSTEM PERFORMANCE STANDARDS FOR REMOTE TOWER OPTICAL SYSTEMS」
(参考文献3)OKIプレスリリース、日本初のリモートRADIO運用のために、「RVA-19型遠隔管制塔装置」を国土交通省航空局へ納入、2022年2月28日
https://www.oki.com/jp/press/2022/02/z21090.html
筆者紹介
升國敦史:Atsushi Masukuni. ソリューションシステム事業本部 社会インフラソリューション事業部 交通ソリューション第二部
西田昌央:Masao Nishida. ソリューションシステム事業本部 社会インフラソリューション事業部 交通ソリューション第二部
平野靖宏:Yasuhiro Hirano. ソリューションシステム事業本部 社会インフラソリューション事業部 交通ソリューション第二部
芝大樹:Hiroki Shiba. ソリューションシステム事業本部
- (注1)Full HD:1920×1080ピクセルの解像度による画像。
- (注2)FPS:Frames per Second。映像の1秒当たりのコマ数。
- (注3)P,T、PTZ:P:パン(カメラのレンズを左右に動かすこと)、T:チルト(カメラのレンズを上下に動かすこと)、Z:ズーム(カメラのズームイン、ズームアウトのこと)
- PDFの閲覧にはAdobe Readerが必要です。Adobe社のサイトからダウンロードしてください。





