
- Home
- OKIの技術
- 技術広報誌 OKIテクニカルレビュー
- No.240
- 自動運転の合流を支援するインフラ協調型LiDARの車両計測技術
技術広報誌 OKIテクニカルレビュー
技術でチャレンジするDX
- 本記事のリーフレット
自動運転の合流を支援するインフラ協調型LiDARの車両計測技術
自動運転車社会実装のメリットは、我が国が抱える課題である交通事故削減と地方の人手不足や移動弱者の解消である(参考文献1)。これらの課題を解決するために「官民ITS構想・ロードマップ」(参考文献2)で高速道路での自動運転L4の市場化(2025年目途)に向けた取組みが設定されている。
自動運転車が、高速道路にスムーズに合流するには、本線に設置されたセンサーで検知した交通情報を自動運転車に情報提供するインフラ協調システムが有用であると考えられている。OKIは、交通インフラ向けソリューションを提供するメーカーとして、次世代モビリティサービスに向けた事業創出に取り組む(参考文献3)ために、国土技術政策総合研究所(以下、国総研(敬称略))主幹の「次世代の協調ITSの実用化に向けた技術開発に関する共同研究」に参加し、インフラ協調センサーの研究開発を進めてきた。本研究は、高速道路合流支援サービス(DAY2)検証を進めるために、国総研試験走路で車両検知センサー精度検証(2020年6月)、実道(駿河湾沼津SA)で同センサー精度検証(2020年11月)、及び、国総研試験走路でDAY2システムの効果検証(2022年3月)を実施した。本稿では、DAY2システムの効果検証を通じ、OKIが開発した3次元LiDARを用いた車両計測技術を紹介する。
DAY2システムと効果検証の概要
DAY2システムは、高速道路の合流部上流の一定区間を走行する車両を車両検知センサーで連続的に検知し、0.1秒ごとに自動運転車にその情報を提供するシステムである(参考文献4)。本線の車両情報は、路側処理装置で合流支援情報に加工され、ITSスポットを介して自動運転車に提供される(図1)。効果検証実験では、センサー検知区間は126mと209mであった。車両は、普通車5台を用い、すべて同じ速度(40km/h、50km/h、70km/h、90km/h)で、車間時間が一定になるように走行した。自動運転車(本実験では手動運転)を模した合流車は、合流ランプ区間で受信した本線情報(「先頭位置」、「速度」、「車間」)を車内モニターで確認しながら、加速車線(50mまたは200m)で、最も車間が広い(車間時間が大きい)車両間へスムーズに合流できるように速度を調整する。この効果検証では、通信間での生成情報の同一性やシステム全体の処理時間などを評価するシステム検証と、情報提供の有無による加速車線上での合流車と本線車両の加減速や合流成功割合などを評価するサービス検証が実施された(参考文献5)。
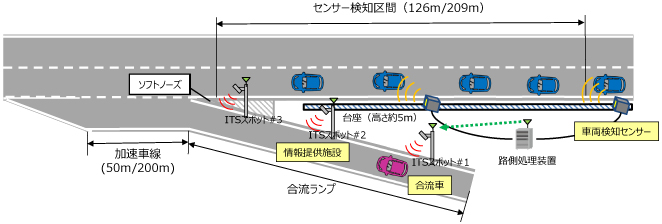
図1 合流支援情報提供システム(DAY2システム)効果検証実験の構成
3次元LiDARによる車両検知センサーの構成と設置
DAY2システムで車両検知センサーに要求される性能は、「設置高5mから検知区間209m(最大)を走行する車両5台をリアルタイム(0.1s以内)に計測し、路側処理装置に送信すること」である。ただし、検知区間には、センサー直下の死角も考慮する必要がある。使用するLiDARは、100m以上の検知距離が見込める製品に絞り、検知距離と点群の空間分解能の観点で選定した。その際、リアルタイム性を担保するためフレームレートが10fps以上で、点群データの正確な取得時刻が得られるSDKが用意されていることも重要視した。その結果、本実験では、Cepton社Vista®(注1)を使用することにした。しかし、選定したLiDARでは、検知区間全体を1台のLiDARでカバーすることができないため、2台利用することにした。センサーは、図1に示すように、道路構造上、検知区間より下流のソフトノーズ付近には設置することができないため、検知区間中央付近と上流端の2か所に、上流から下流に向けるように設置した。
3次元点群処理による車両計測技術
2台のLiDARを上流から下流に向けて設置し、車両の「先頭位置」、「速度」、「車間(前方車両の後尾と後方車両の先頭の距離)」、「車長(車両の先頭と後尾の距離)」を計測する場合、次のような懸念があった。
①走行車両の後尾位置は計測できるが、先頭位置は見え方が変化するため瞬時的に正しく計測することができない。
②上記の理由から、車長も瞬時的に正しく計測することができない。
③2台のレーザーの照射範囲が重なる領域(以下、継ぎ目区間と称する)で、計測が不安定になる可能性がある。
そこで、①を対策するために、自社で開発した「車両先頭・後尾位置推定方式」(特許第7078066号)を利用した。そして、②を対策するために、同一車両を追跡する間に計測された車長の最大値を利用することにしていたが、実際の車長と数mの誤差が生じることが判明したため、その対策を検討した。さらに、③では、特に速度で大きな誤差が生じたため、速度安定化を施すことにした。以下、①~③の対策を説明する。
(1)車両先頭・後尾位置推定
車両の先頭を「車両が移動する方向の前方である」と定義したとき、その対面側が後尾である。たとえば、LiDAR座標系を道路面(x-y面)に対し水平になるように設置したとき、走行方向と先頭と後尾の位置関係は図2のようになる。
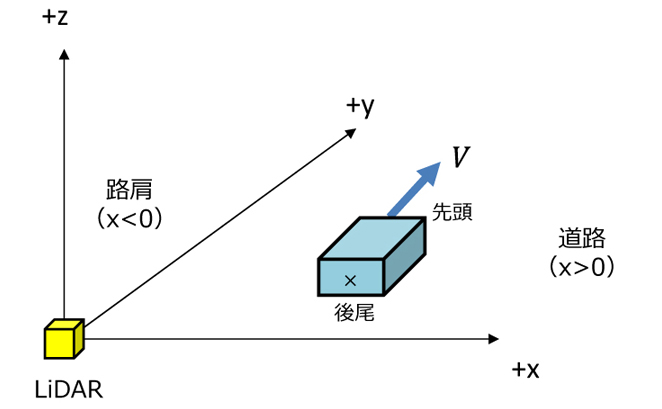
図2 LiDAR座標系と道路の配置
車両の先頭と後尾を検出する方式は、次のとおりである(図3)。
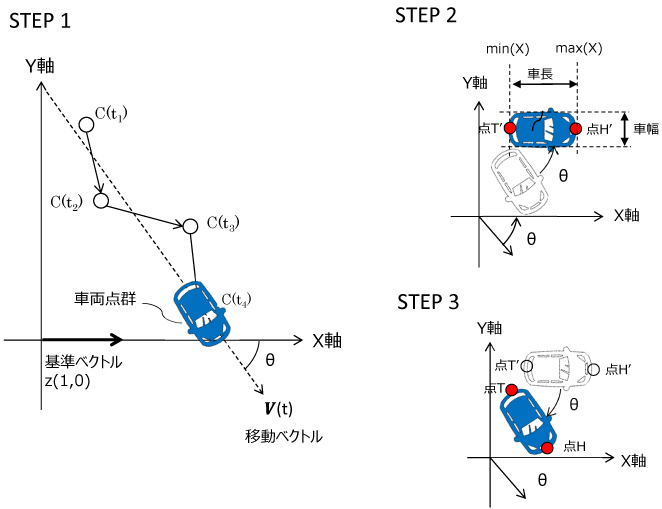
図3 先頭・後尾位置検出処理(特許第7078066号)
・STEP1
道路上から車両点群のみを抽出し、車両の代表位置C(t)=(x(t),y(t),z(t))[m]を決定する。そして、時刻が異なる代表位置C(ti)(i=1~n)同士を対応付けすることで車両の動線を生成し、それらの時間変化から移動ベクトルV(t)=Vx+Vy [m/frame]を推定する。その際、V(t)とあらかじめ決めておいた基準ベクトル(たとえば、LiDAR x軸)とのなす角θ[rad]を算出しておく。
・STEP2
V(t)が基準ベクトルの+方向と一致するように、車両点群をθ[rad]だけ回転させる。このとき、車両点群のxの最大値が車両の先頭(点H’)、最小値が車両の後尾(点T’)となる。
・STEP3
点H’と点T’を-θ[rad]だけ回転させ、実際の車両の先頭(点H)と後尾(点T)を求める。
本方式によって検出した車両の先頭と後尾位置の例を図4に示す。
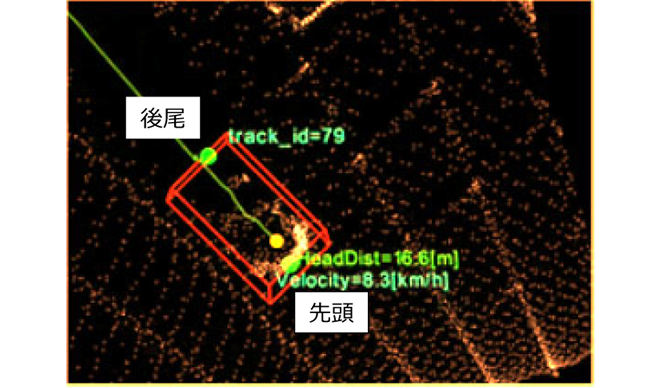
図4 車両の先頭と後尾位置の検出例
(2)走行車両の車長推定
高所に設置したLiDARから走行する車両を計測すると、レーザーの照射範囲と車両の位置関係により、車両の見え方が時々刻々と変化する(図5)。そのため、車両全体にレーザーが当たっているタイミングで車長を計測することがよいのではないかと考えた。当初、計測された車長の最大値が、それに相当すると考えたが、車長は実際よりも数m長く観測されていた。それは、LiDARがスキャン方式であることが原因ではないかと仮説を立てた。
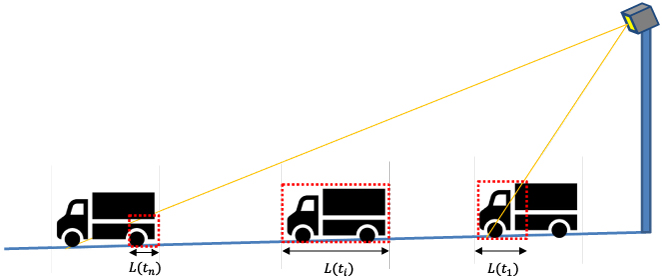
図5 レーザーの照射範囲と車長の見え方
速度v[km/h]で走行する車両(車長Lo[m])をスキャンレートn[fps]のセンサーで計測したときに観測される疑似車長L[m]は、次式となると考えた。

上式によると、時速90kmで走行する8m長トラックをLiDARで計測すると、約2.5m伸びることになる。図6はLiDARで計測した車長の最大値と走行速度と関係をプロットしたものである。このとき、LiDARのフレームレートは10fpsである。なお、速度0[km/h]の値は、車両の仕様上の車長である。この図が示すように、スキャン式LiDARで計測された車長は、式(1)に従って伸びていくことが確認された。そのため、より高精度に車長を推定するために、計測車長を式(1)に従って補正することにした。
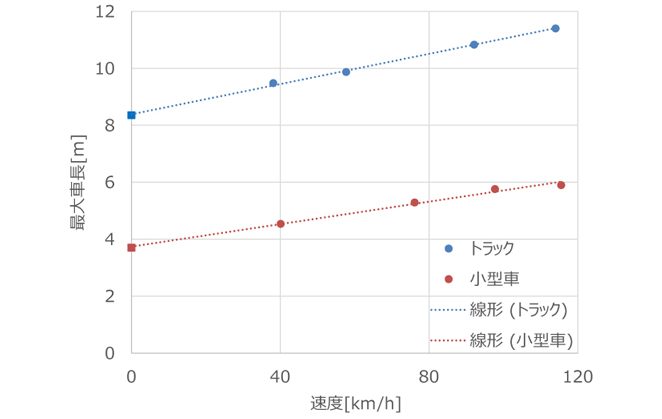
図6 LiDARで計測された車長と速度の関係
(3)センサー間車速推定の安定化(参考文献6)
図7に示すように、車両検知の連続性を担保するために、各LiDARの検知区間が一部オーバーラップするように配置した。
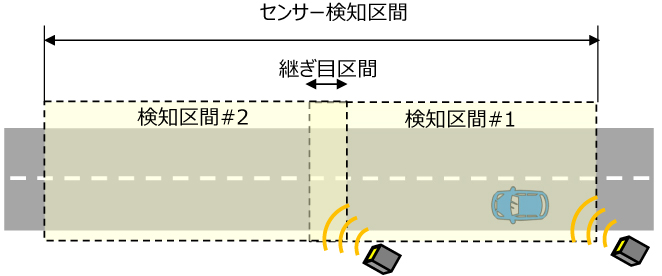
図7 センサー設置と各LiDARの検知区間
(2)で説明したように、レーザーと車両との位置関係で車両の見え方が変わるため、継ぎ目区間及びその前後区間で、各LiDARで取得された車両点群を合成すると、その分布が大きく変化する。この点群を用いて車両の位置や速度を瞬時的に計測すると、計測値が不安定になる可能性がある。そこで、継ぎ目区間での速度の変化に着目し、平滑化フィルターの効果を比較評価した。
図8に、一定速度で走行させた車両の速度誤差を示す。車速の真値は、走行車に搭載したRTK-GPS測位システムを用いて、0.1s間隔で取得した。図8「フィルターなし」に示すように、瞬時的な速度では、継ぎ目区間で大きな誤差を生じることが分かった。
そこで、次の2種類の平滑化フィルターの効果を検証した。
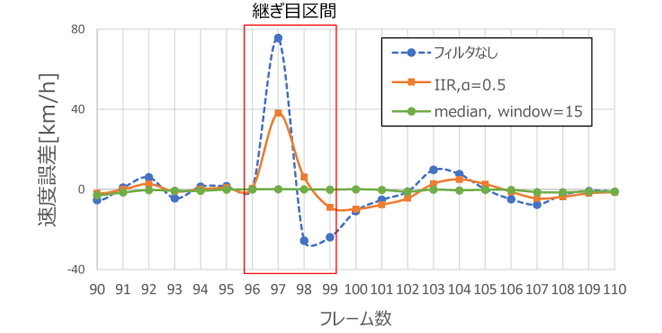
図8 車速推定の平滑化効果比較
・IIRフィルター

・medianフィルター

ここで、Vt は時刻t [s]での推定車速[km/h]、 は平滑化後の車速[km/h]、αは重み(0.0≤α≤1.0)、windowはウインドウサイズである。
は平滑化後の車速[km/h]、αは重み(0.0≤α≤1.0)、windowはウインドウサイズである。
ここで、Vt は時刻t [s]での推定車速[km/h]、 は平滑化後の車速[km/h]、αは重み(0.0≤α≤1.0)、windowはウインドウサイズである。
は平滑化後の車速[km/h]、αは重み(0.0≤α≤1.0)、windowはウインドウサイズである。
図8に示すとおり、各平滑化フィルターをかけることにより、誤差が軽減されていることが分かった。IIR(Infinite Impulse Response)フィルターでは、インパルス応答の過渡期が存在するため、平滑化をかけても継ぎ目区間外で大きく長い誤差の揺らぎが生じている。他方、medianフィルターでは、ウインドウサイズ内の中央値を算出する統計手法であるために、瞬時的に発生する大きな誤差を概ね除去することができることが分かった。このように、統計手法を用いた方式の方が、継ぎ目区間のノイズ除去に適していることが分かった。
今後の取組み
OKIは、交通分野での新しいソリューション創出を目指し、自動運転の安全走行を支援するためのインフラ協調型LiDARセンシング技術の研究開発を進めている。LiDARは、耐環境性も高く、高度な信号処理技術によりエッジでのリアルタイム処理もできる。さらに、センシングによって得られる正確な計測値をリアルタイムにAI処理することにより、車両の異常な挙動や予測推定もできるようになると考えている。OKIは、LiDARセンシング技術による社会インフラの高度化を目指し、「社会の大丈夫をつくっていく。」を実現します。
参考文献
(参考文献1)内閣官房IT総合戦略室:自動走行の実現に向けた取組、経済産業省「第4次産業革命」会合(第2回)資料4、平成30年1月、
https://www.kantei.go.jp/jp/singi/keizaisaisei/miraitoshikaigi/suishinkaigo2018/revolution/dai2/siryou4.pdf
[1.8MB]![]() (外部サイト)
(外部サイト)
(参考文献2)鈴木崇弘:官民ITS構想・ロードマップ、SIP-adusWorkshop 2021、2021年11月
https://www.sip-adus.go.jp/evt/workshop2021/file/jg/JGov_2J_Takahiro_Suzuki.pdf [2.7MB]![]() (外部サイト)
(外部サイト)
(参考文献3)古川純平、佐藤敦司、黒須正樹:次世代モビリティサービスへのOKI取組み~協調型ITS・ETC多目的利用サービス~、OKIテクニカルレビュー 第236号、Vol.87 No.2、pp.44-47、2020年11月
(参考文献4)中川敏正:高速道路の合流支援サービスの取組、SIP-adadus Workshp 2020、2020年11月
https://www.sip-adus.go.jp/evt/workshop2020/file/sr/SR_06J_Nakagawa.pdf [1.8MB]![]() (外部サイト)
(外部サイト)
(参考文献5)中田諒、花守輝明、中川敏正、関谷浩孝:高速道路における安全で円滑な自動運転の実現に向けた取組、(一社)土木研究センター・土木技術資料、Vol.64、pp.12-15、2022年
(参考文献6)岡本駿志、平本美智代:自動運転車の合流支援を実現するインフラ協調LiDARによる車速推定安定化のための一検討、電子情報通信学会2022年総合大会、2022年3月
筆者紹介
平本美智代:Michiyo Hiramoto. イノベーション推進センター センシング技術研究開発部
岡本駿志:Shunji Okamoto. イノベーション推進センター センシング技術研究開発部
用語解説
- 3次元LiDAR
- 2次元状にレーザーを走査し、3次元空間の距離を計測するセンサーである。
- RTK-GPS測位
- Real Time Kinematic GPS測位の略。基準点からの補正信号を用いて観測点の位置を高精度に測位する方式である。リアルタイムに搬送波位相を推定することで、数cmの誤差で位置を決定することができる。
- (注1)VistaはCepton社(米国)の登録商標です。
- PDFの閲覧にはAdobe Readerが必要です。Adobe社のサイトからダウンロードしてください。





