ETC2.0プローブデータを活用した渋滞予測技術
本記事のリーフレット
OKIはETC(Electronic Toll Collection system)2.0プローブデータの収集・蓄積を含むさまざまな処理を行う道路管理システムを多数開発するとともに、プローブデータを含む車両関係のデータを用いたさまざまな分析・検知・予測技術の研究開発に取り組んでいる。本稿では、プローブデータの概要を説明した後、数時間先の渋滞を予測する技術について述べる。
ETC2.0プローブデータ
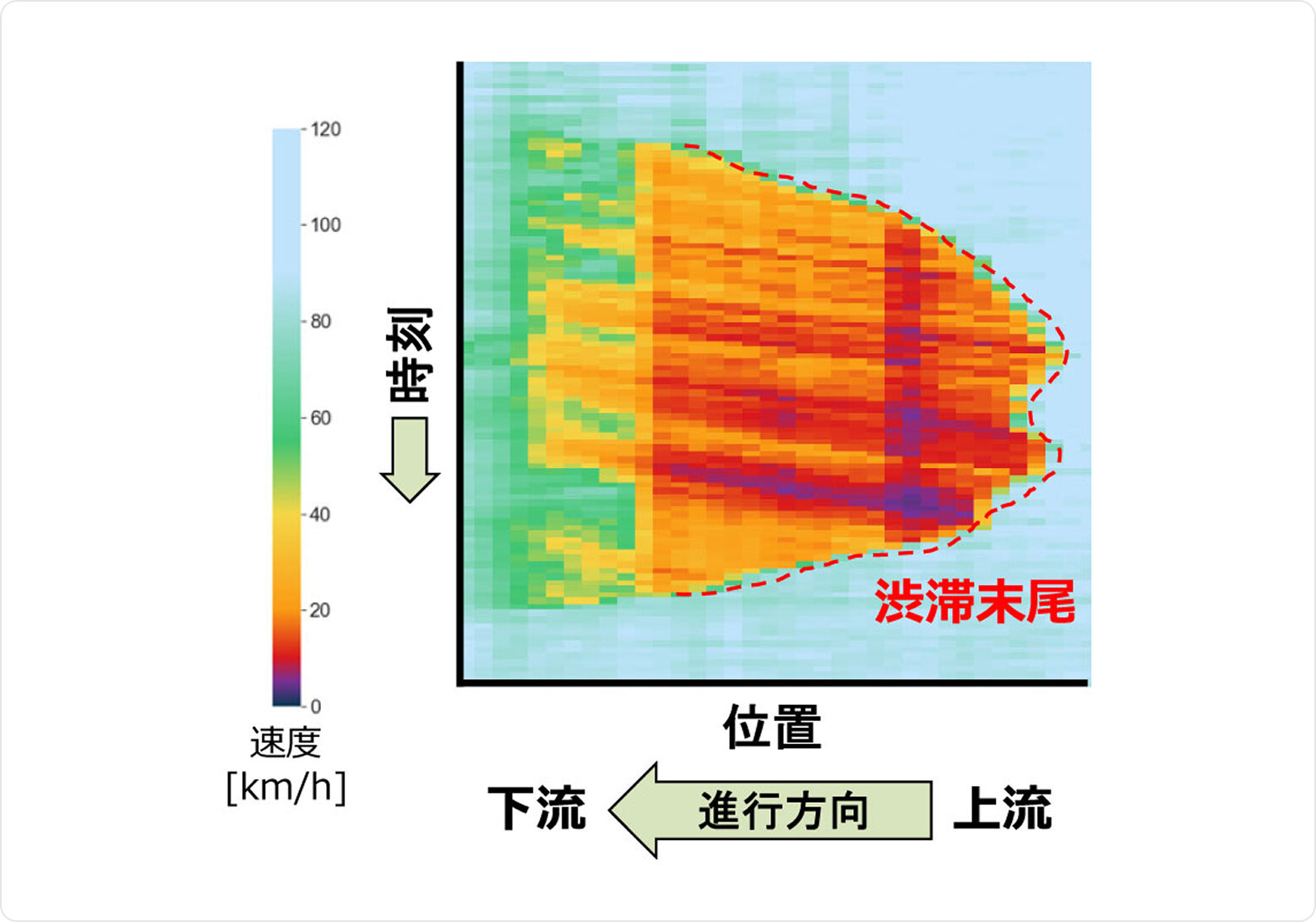
プローブデータは、ETC2.0対応の車載器に蓄積される車両ごとの走行履歴・挙動履歴データを指し、路上に設置された受信アンテナを経由してサーバーにアップリンクされる。走行履歴には200mの走行ごとに車両の緯度・経度・速度情報などが記録され、時刻・位置ごとのメッシュデータに変換したヒートマップで速度情報を可視化すると図1に示すような渋滞図を得る。この図から、渋滞がいつどこで発生・解消したかを簡便かつ詳細に把握することができる。
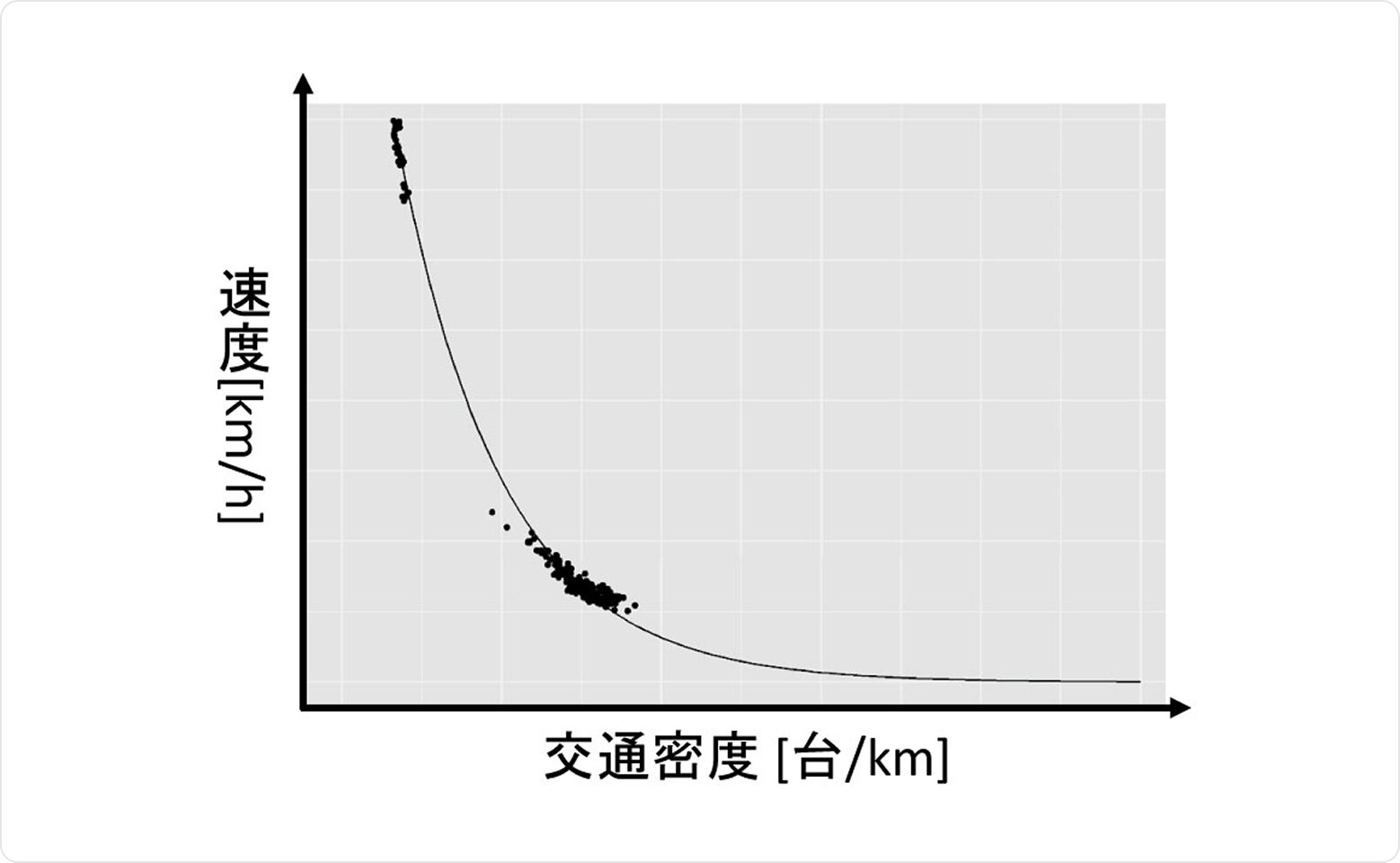
しかし、速度情報だけでは、たとえば道路が空いている自由流と渋滞発生前の混雑した自由流の違いは表れにくい。よって、渋滞の発生を予測するうえでは交通量、若しくは交通密度の情報を利用することが望ましい。ただし、プローブデータは普及率の点から全体の交通量を直接得ることはできないため、車両感知器などで観測する交通量データをプローブデータに組み合わせる必要がある。車両感知器の設置位置で観測した交通量と速度から交通密度を算出するとKV曲線と呼ばれる図2に示すような関係が成り立つ。特に渋滞となる速度付近では指数関数で近似できることが知られている(Underwoodのモデル(参考文献1))。この関係を利用することで、車両感知器が設置されていない位置の交通密度もプローブデータの速度情報から推定することができる。
リアルタイムな渋滞情報の課題
これまでにOKIはプローブデータから推定した交通密度のパターンを利用することで、リアルタイムに受信できていない位置のプローブデータを補間し、リアルタイムに渋滞情報を提供できるシステムを構築してきた。しかし、補間されたデータはその時点の交通状況であり、それらは走行中に刻々と変化するためドライバーが実感する交通流に近づけるには以降の交通流の変化を考慮する必要があった。
そこで我々は、渋滞などの交通情報提供の高度化を目指して、ドライバーが実感する交通流の予測を実現するという課題に取り組み、数時間先の交通流の予測技術(参考文献2)を開発した。
数時間先の渋滞予測技術
前節で述べた課題に対し、数時間先の交通流を精度よく予測するためには、交通流の特性に応じた予測手法を選択することが重要である。渋滞は交通集中渋滞と突発渋滞の概ね2種類に分類され、それぞれ発生する要因や特性が異なる。よって、我々は渋滞の特性に応じた2種の渋滞予測手法および交通流に応じた渋滞予測の切り換え手法を開発した。それぞれの交通流の特性と適用する手法の説明を以下に述べる。
(1)第一の渋滞予測手法:パーセンタイル方式
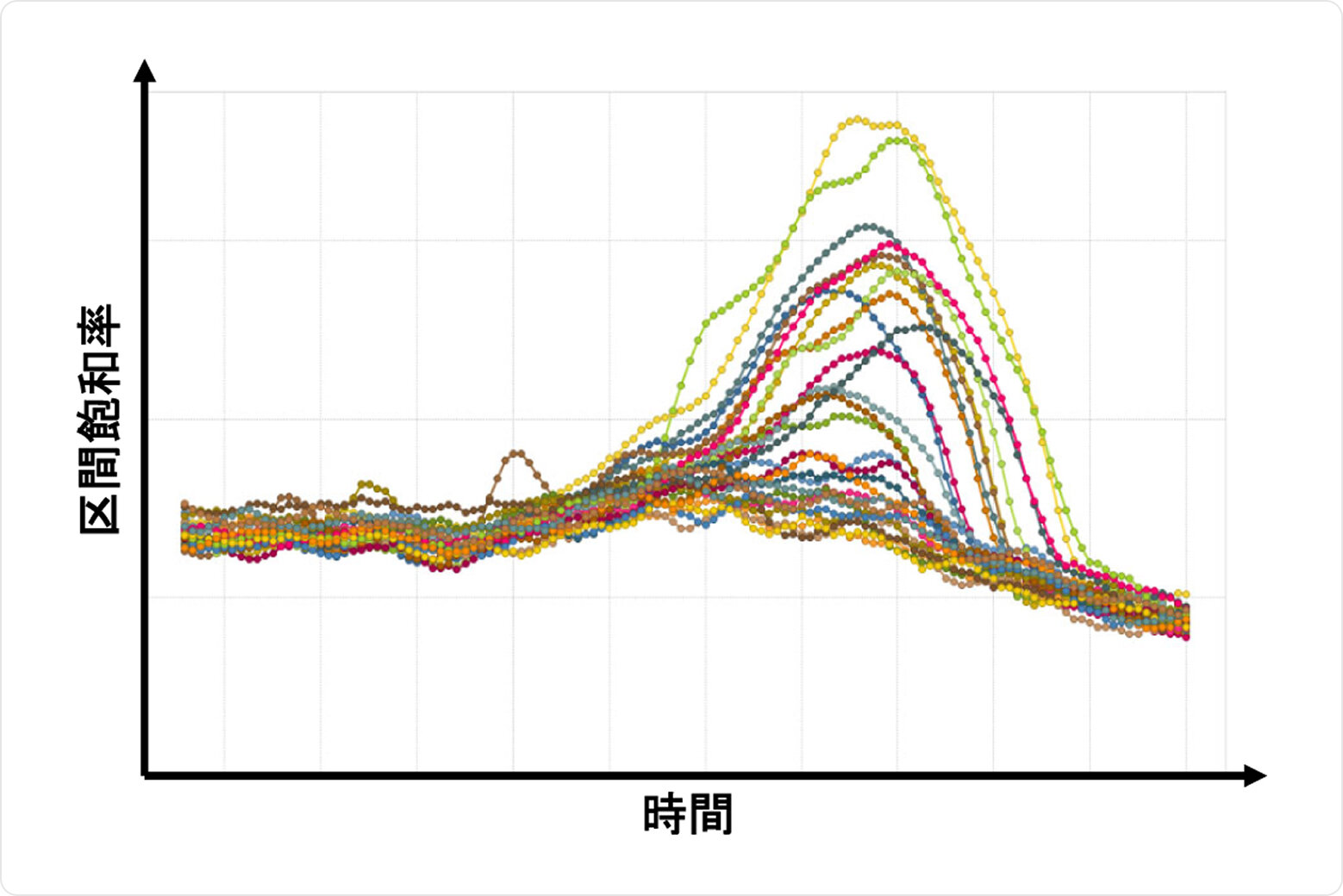
通勤ラッシュなどで交通需要が増加すると、下り坂から上り坂にさしかかるサグ部やトンネル入口などの速度低下が生じやすい位置を先頭に交通集中渋滞が発生する。このとき、渋滞から下流に流出する車両台数が減少して上流から渋滞に流入する車両台数を下回るため、区間当たりの車両台数が増加する。ある区間の交通密度の最大値に対する割合を飽和率とし、その平均値(以下、区間飽和率)を日付ごとに可視化すると図3に示すようにある時刻をピークに高い値を示す。また、区間飽和率は自由流から渋滞流に発展する過程で徐々に上昇し、前時刻の区間飽和率が高いほど次時刻以降の区間飽和率も高い水準で推移する傾向がある。
以上のことから、区間飽和率の傾向を学習させることで、今後の渋滞の発生や規模を予測することができる。開発した予測手法(以下、パーセンタイル方式)の具体的な方法を以下に述べる。
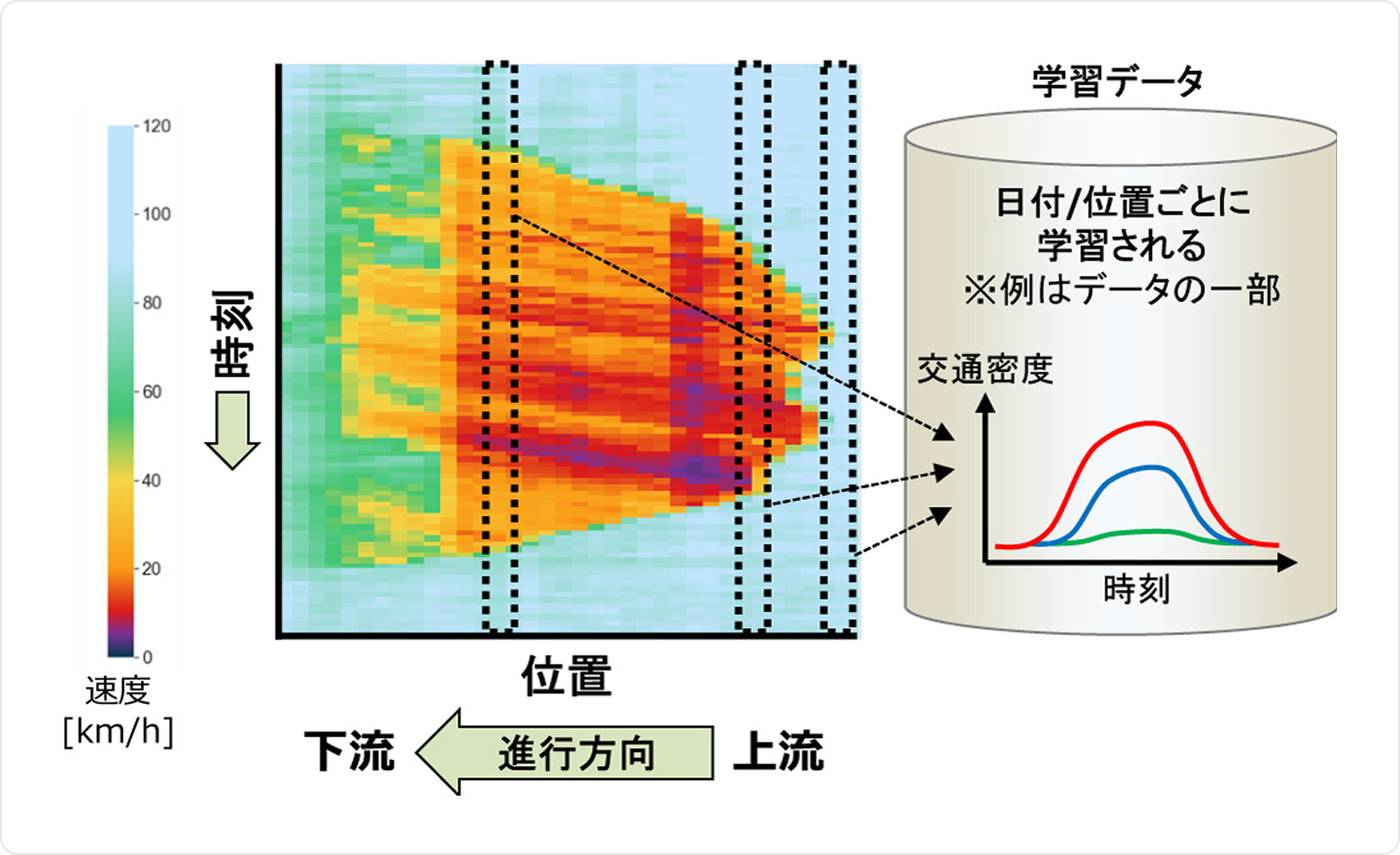
パーセンタイル方式では、学習時に蓄積データに対して設定した時間幅・区間で算出した区間飽和率と時空間メッシュごとの飽和率をそれぞれ学習させる。このとき、それぞれの学習データについて、ほかの日付と比較したときの水準としてパーセンタイル値を算出する。予測時には、予測時点までのデータに対して、学習時と同じ時間幅・区間で算出した区間飽和率を算出し、同時刻の学習データから最も近い区間飽和率をマッチングによって求め、そのパーセンタイル値を取得する。最後に、数時間先に渡る各時空間メッシュの予測として、取得した区間飽和率のパーセンタイル値に近いパーセンタイル値の飽和率を学習データからマッチングによって求める。以上がパーセンタイル方式の学習および予測方法である(図4)。
(2)第二の渋滞予測手法:空間パターン方式
交通集中渋滞に対して、事故・規制などの突発事象によって発生する突発渋滞は条件によって規模が大きく異なり、前述の区間飽和率のような時間的傾向をもつ特性を得ることは難しい。よって、時間的傾向よりも事象に対する空間的傾向を利用する手法(参考文献3)(以下、空間パターン方式)が有効である。
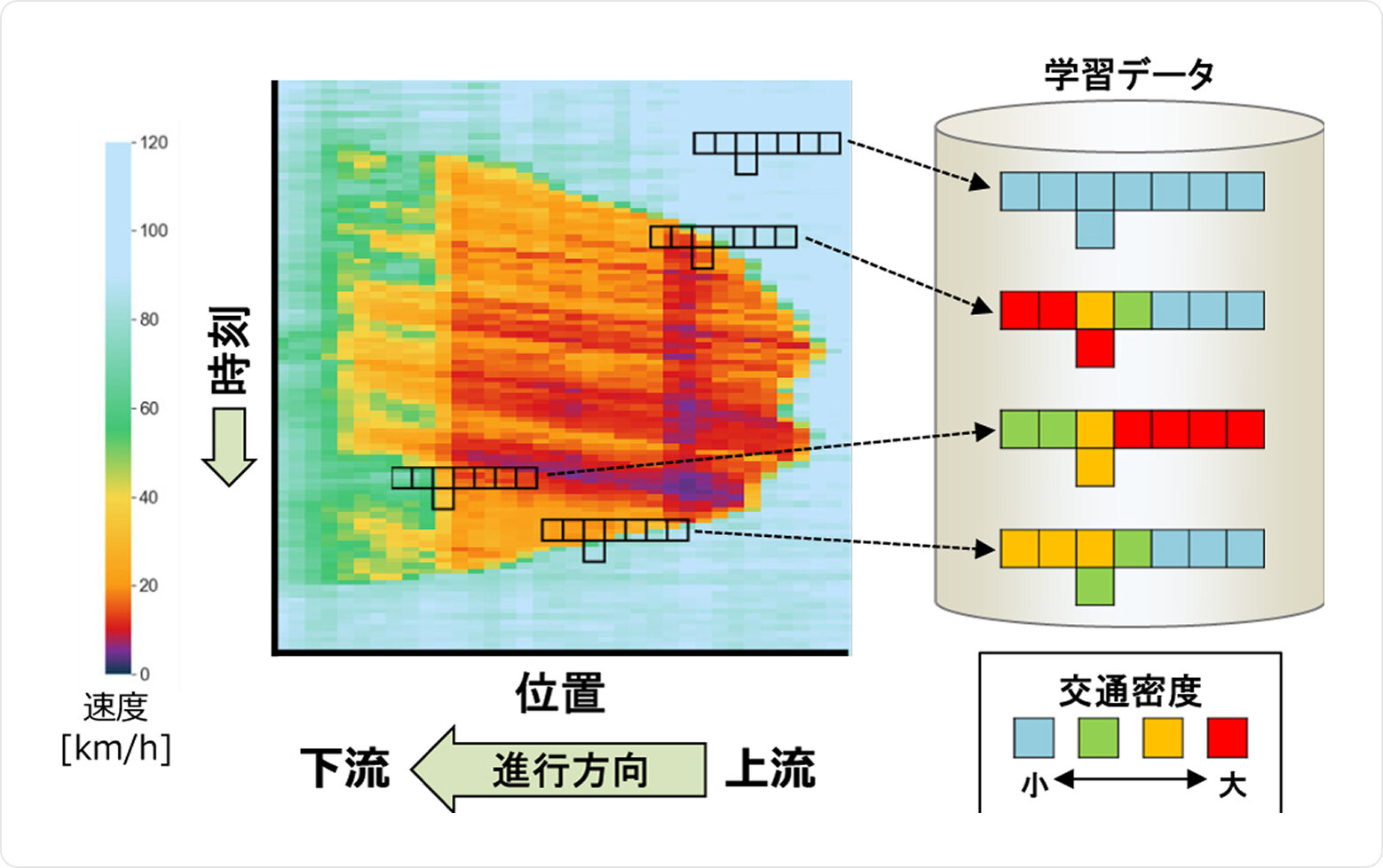
空間パターン方式では、1つの対象メッシュを起点にして上下流それぞれに設定した数メッシュ区間をとり、その区間内の交通密度の変化パターンと次時刻の交通密度の関係を学習させる。このようなメッシュパターンを蓄積データの各メッシュに対して求めて学習データとしてあらかじめ蓄積しておく。予測時も同様に対象メッシュに対して設定した区間の交通密度の変化パターンを求め、学習データの中から最も類似するパターンを探索して次時刻の交通密度を求める。これを予測が必要な時空間メッシュの数だけ繰り返す。以上が空間パターン方式の学習および予測方法である(図5)。
(3)交通流に応じた渋滞予測手法の切り替え
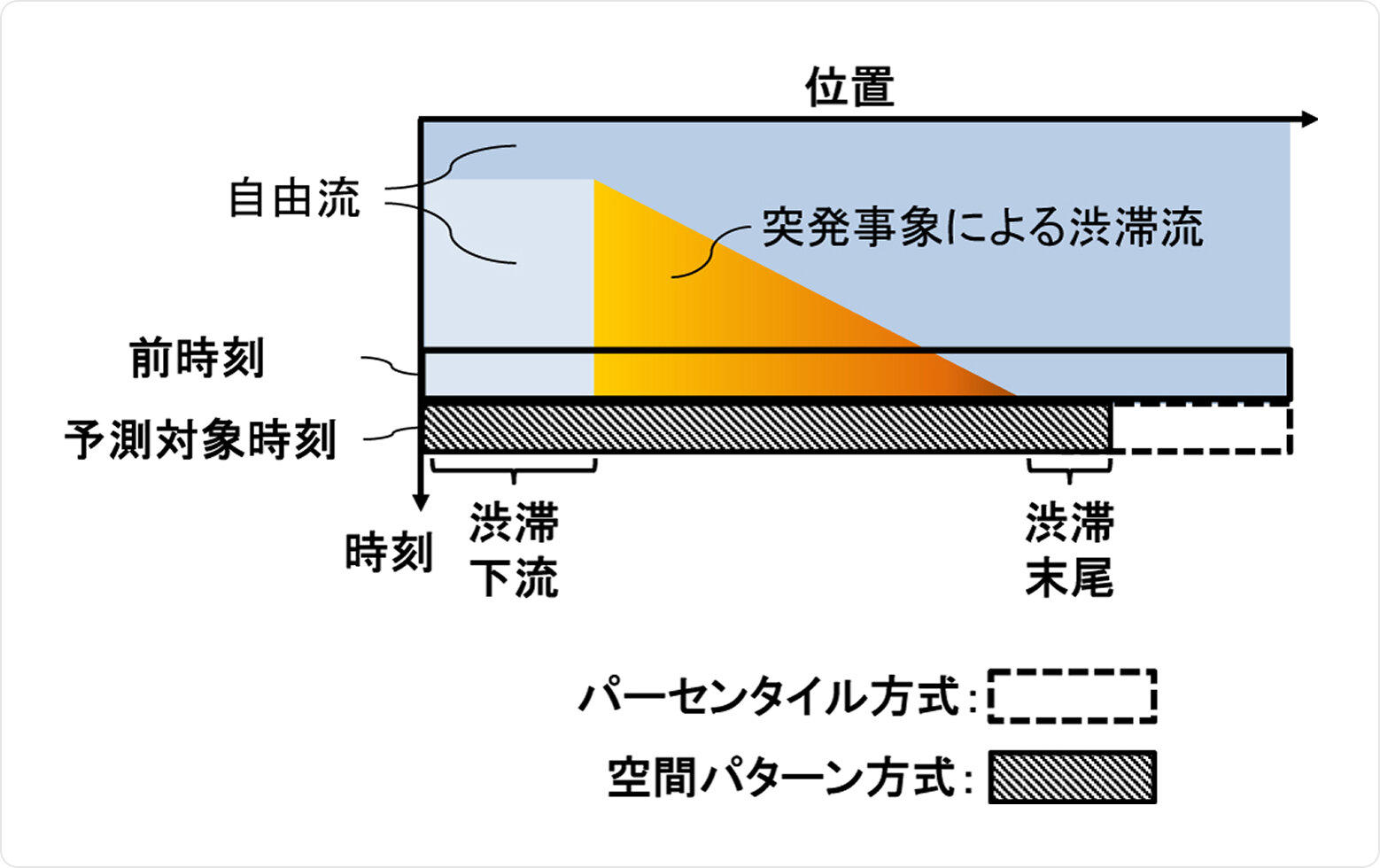
ここまで2種の渋滞予測手法を述べたが、パーセンタイル方式だけでは突発渋滞の予測は困難であり、また空間パターン方式だけでも時間帯などによる交通需要の変化を捉えられないため高い精度は望めない。よって、2種の渋滞予測手法を組み合わせ、時空間メッシュごとの交通流に応じて渋滞予測手法を切り替える方式を開発した。具体的には、突発事象の影響がない自由流に対してはパーセンタイル方式を適用し、突発事象の影響があると考えられる自由流および渋滞流に対しては空間パターン方式を適用する。ここで突発事象の影響がある交通流とは、突発事象発生地点を含む渋滞流・渋滞下流の自由流・渋滞末尾から上流数メッシュを指す。これら交通流の内、渋滞流以外も突発事象の影響対象に含める理由は、突発事象の影響で発生した渋滞下流の自由流は、突発事象の発生地点で急激に交通流が規制されることで交通密度が極めて低くなり、従来とは異なる交通流の時間変動になるためである。また、渋滞末尾から上流数メッシュは渋滞の延伸や解消の影響を強く受けるためである。パーセンタイル方式と空間パターン方式のそれぞれの適用範囲を模式的に表したものを図6に示す。それぞれの適用領域は前時刻の交通流に応じて決定されるため、前時刻の実測または予測結果を基に、数時間先に渡って逐次的に適用領域の判定と各方式の予測を実行する。
渋滞予測手法の検証
前節の(1)~(3)の手法を用いた数時間先の渋滞予測の検証結果を以下に述べる。検証には、実在する高速道路の12日分のデータとして、プローブデータ・車両感知器データ・管制によって入力された事故情報などのイベントデータを利用し、予測対象日とは異なる日付のデータを学習させて予測する交差検証を行った。
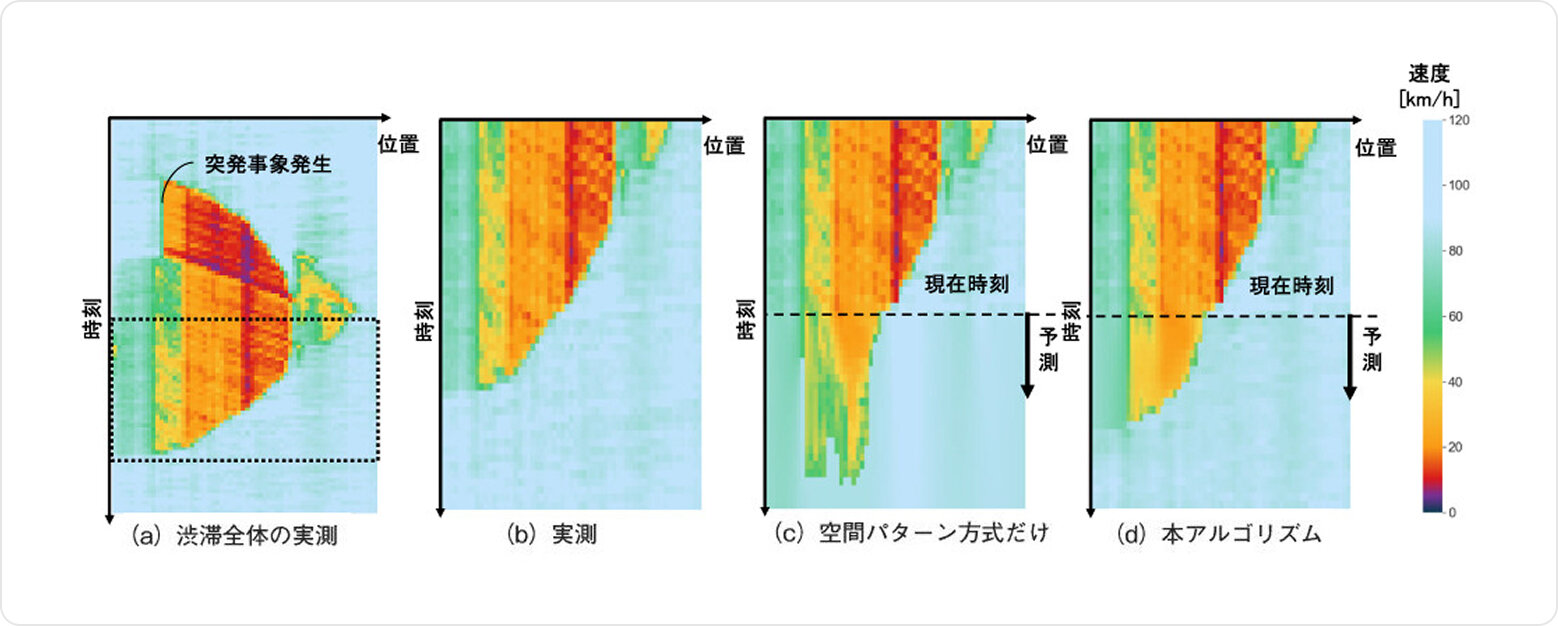
交通流に応じた渋滞予測手法の切り換えによる効果を見るために、ある日の突発渋滞に対して、空間パターン方式だけを適用した場合と2種の渋滞予測手法を切り換えて適用した場合の予測を比較した。なお、パーセンタイル方式だけを適用した場合は、突発渋滞の予測の精度が著しく悪いため図示していない。それぞれの渋滞図を図7に示す。図7(a)はある突発事象発生日の1日分の渋滞図である。図7(b)~(d)は図7(a)の点線で囲んだ時刻・区間の実測の渋滞図および予測の渋滞図である。図7(b)は実測の渋滞図である。図7(c)は比較例として、空間パターン方式だけを適用して予測した場合である。
この場合、渋滞流へ上流から流入する交通流を正確に予測できないため、渋滞の延伸を正しく予測できない。図7(d)は提案方式を適用して予測した場合である。渋滞流へ流入する自由流をパーセンタイル方式によって、渋滞流を空間パターン方式に切り替えて予測することで、突発事象に起因する渋滞でも実測に近い予測できていることが分かる。
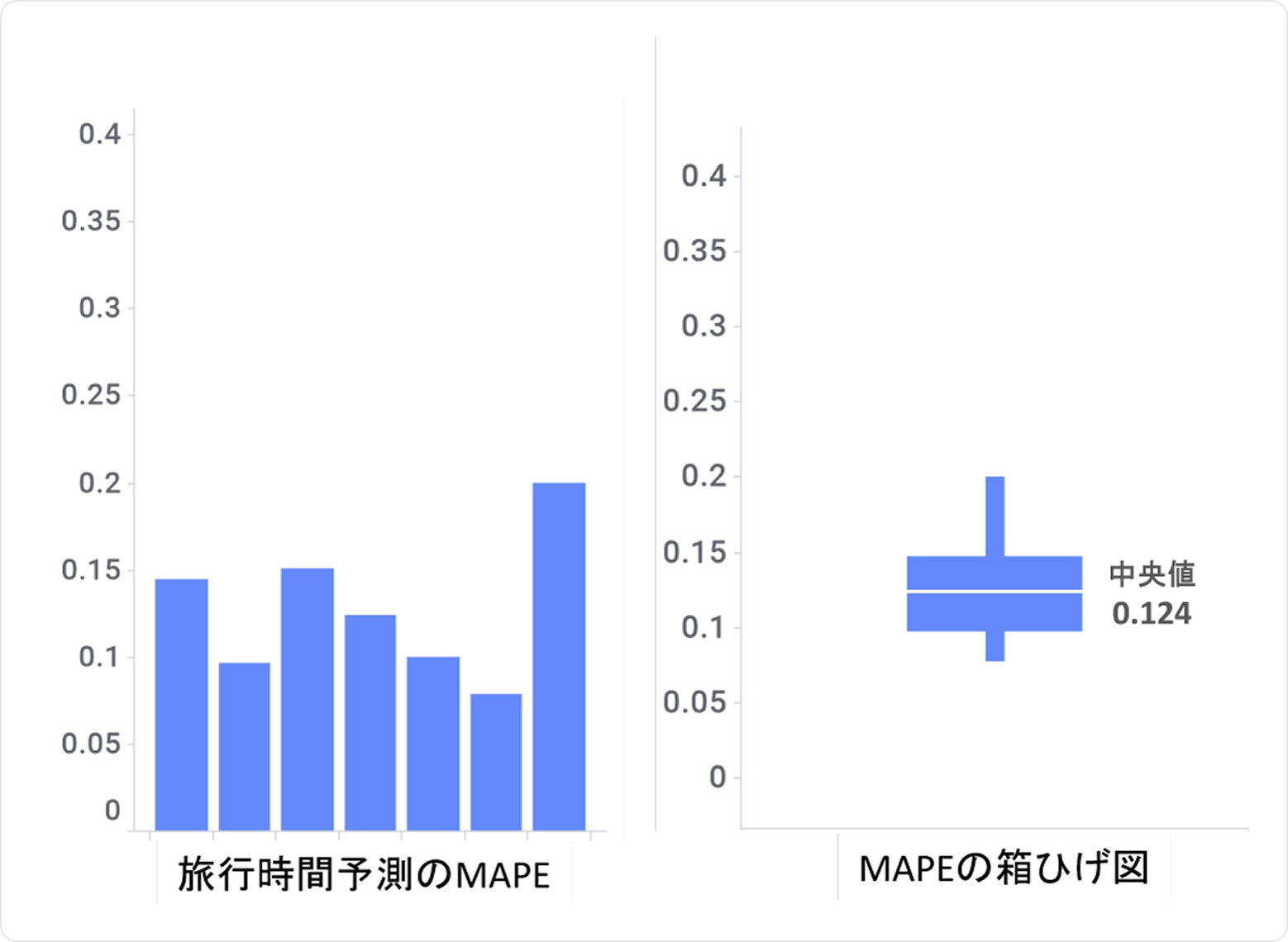
そのほかの日付の検証結果として、事故などの突発事象が発生した7日分の交通流予測の評価結果を図8に示す。なお、評価指標には渋滞図から見積もられる区間の旅行時間の平均絶対誤差率(MAPE:Mean Absolute Percentage Error)を用いた。すべての日付でMAPEは20%以下となり、中央値にして12.4%と良好な結果を得た。
まとめ
本稿では、開発技術であるプローブデータを利用した2種の渋滞予測手法とその切り換えアルゴリズムによる数時間先の渋滞予測技術を紹介した。本技術は、特に突発事象が発生した場合でも精度よく交通流を予測できており一定の有効性を示した。今後はより多くのデータセットを用いた検証実験をすると共に、現行の情報提供システムに類する予測方式との比較検証を進め、実導入を目指す。
参考文献
(参考文献1)Wang, H., et al.: Logistic modeling of the equilibrium speed-density relationship, Transportation research part A: policy and practice 45(6), 554-566, 2011.
(参考文献2)鈴木貴大、岡野謙悟、中村龍馬、松平正樹:交通流の特性に応じた交通流予測方式の切り替え、人工知能学会第37回全国大会(2023)、2023年
(参考文献3)増田淳基、松平正樹、林正博:ETC2.0プローブデータを利用した高速道の渋滞予測・交通異常検知技術、OKIテクニカルレビュー 第233号、Vol.86 No.1、pp.52-55、2019年5月
筆者紹介
岡野謙悟:Kengo Okano. 技術本部 先行開発センター センシング先行開発部
鈴木貴大:Takahiro Suzuki. 技術本部 先行開発センター センシング先行開発部
中村龍馬:Ryoma Nakamura. 技術本部 先行開発センター センシング先行開発部
用語解説
自由流
一般に渋滞していない交通流を指し、交通需要が道路の容量を超えて速度低下した渋滞流と対比して非渋滞流とも呼ばれる。
交通密度
道路の単位区間当たりに存在する車両数で一般的に[台/km]で表す。
パーセンタイル値
計測値の分布において最小値を0%、最大値を100%とした時に、最小値から数えて何%に位置するかを示す値。
