ロケット搭載筺体の熱解析 ~真空空間での非定常伝熱シミュレーション~
本記事のリーフレット
近年、宇宙ビジネスへの需要が高まっており、世界的に見ても市場規模が年々増加している。宇宙ビジネスと一言で言ってもその内容は多岐にわたる。たとえば、宇宙空間に設置され上空から情報伝達を行う人工衛星、人工衛星などを宇宙空間に輸送するロケット、衛星通信を利用したサービス、そしてそれらを支える地上設備などが含まれる。人工衛星やロケットでは、周囲環境が地上と大きく異なるため、開発時は異なる設計手法が必要となる。今回は、ロケット搭載用通信機器の筺体開発において、特に熱解析で実施した解析手法について紹介する。
熱解析および伝熱の基礎について
熱解析とは、熱の移動による製品の温度分布状態や熱応力を机上で算出する手法である。熱解析では製品が置かれる環境を自由に設定でき、実物では測定不可能な箇所の温度も算出可能である。製造して試験を行う前に設計検証ができ、開発期間短縮や製造コスト削減が可能なため、製品開発工程内で実施されることが多い。
一般的な熱解析は、有限要素法を用いて範囲を細かく分割した後、それぞれの要素や節点に対して伝熱の3つの基本形態に関する物理方程式を用いて温度を算出する。伝熱の3つの基本形態とは、「熱伝導」、「対流熱伝達」、「放射伝熱」であり、それぞれ次のように分類される。
(1)熱伝導:物体の内部で熱い部分から冷たい部分へ熱が伝わる現象。
(2)対流熱伝達:固体表面とその周りを流れる流体との間で、流れによって熱が伝わる現象。重力の影響で流体に流れが発生する自然対流と、外部エネルギーを与えて流体に流れを発生させる強制対流がある。
(3)放射伝熱:熱い物体から冷たい物体に直接に空間を通して電磁波の形で熱が伝わる現象。したがって、真空中でも熱が伝わる。輻射伝熱とも呼ばれる。
宇宙空間での機器の温度上昇を考える場合、機器周辺および内部の空気は存在しないか、もしくは極端に薄く、先述の対流熱伝達による熱の移動は無視できるほど少ないと考えられる。したがって、宇宙空間での熱解析では、熱伝導と放射伝熱のみを考慮すればよい。
ロケット特有の条件について
ロケットは、その使用目的から次のような特徴がある。
(1)非常に短命である。
ロケットは打ち上げてから宇宙空間に到達し、人工衛星などを分離した時点で役目を終える。その時間は全体の重量やエンジン性能によって異なるが、20分弱~50分程度である。その後は落下軌道に制御して海に落とす。この状況を熱解析に適用する場合、通常の条件とは実施方法を変える必要がある。通常の熱解析は定常状態(発熱と冷却が釣り合い、温度が一定になる状態)での温度分布を求めて良否判定を行う。しかし、実際の物質は熱をかけてから温度が上昇するまで時間が必要であり、ロケット内部の機器は温度が定常状態になる前に停止すると考えるのが現実的である。そのため、時間変化の影響を受けない定常解析ではなく、非定常解析(経過時間に応じた温度を求める解析)を実施する必要がある。
(2)ロケット自体の放熱は放射伝熱、内部機器の放熱は熱伝導が主となる。
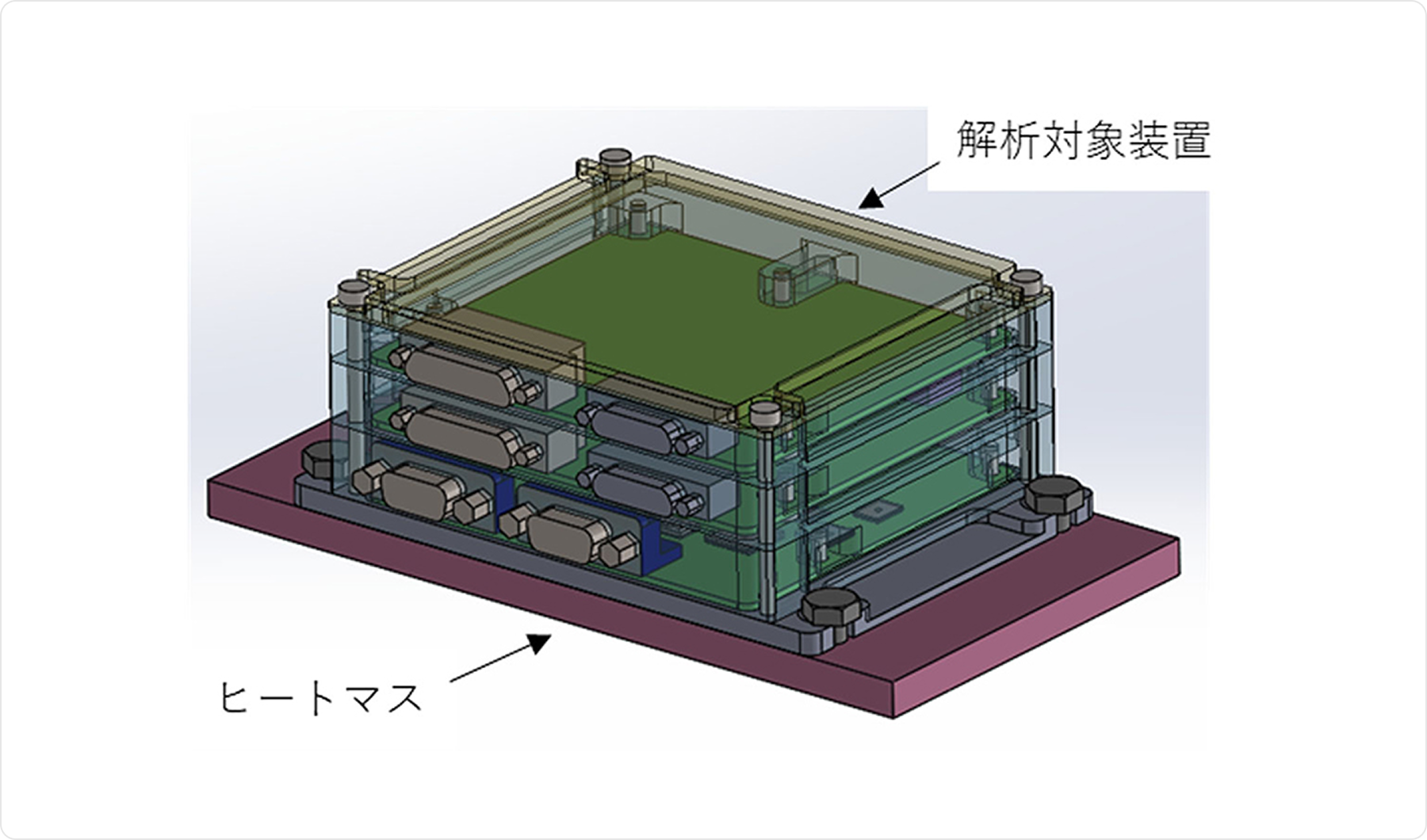
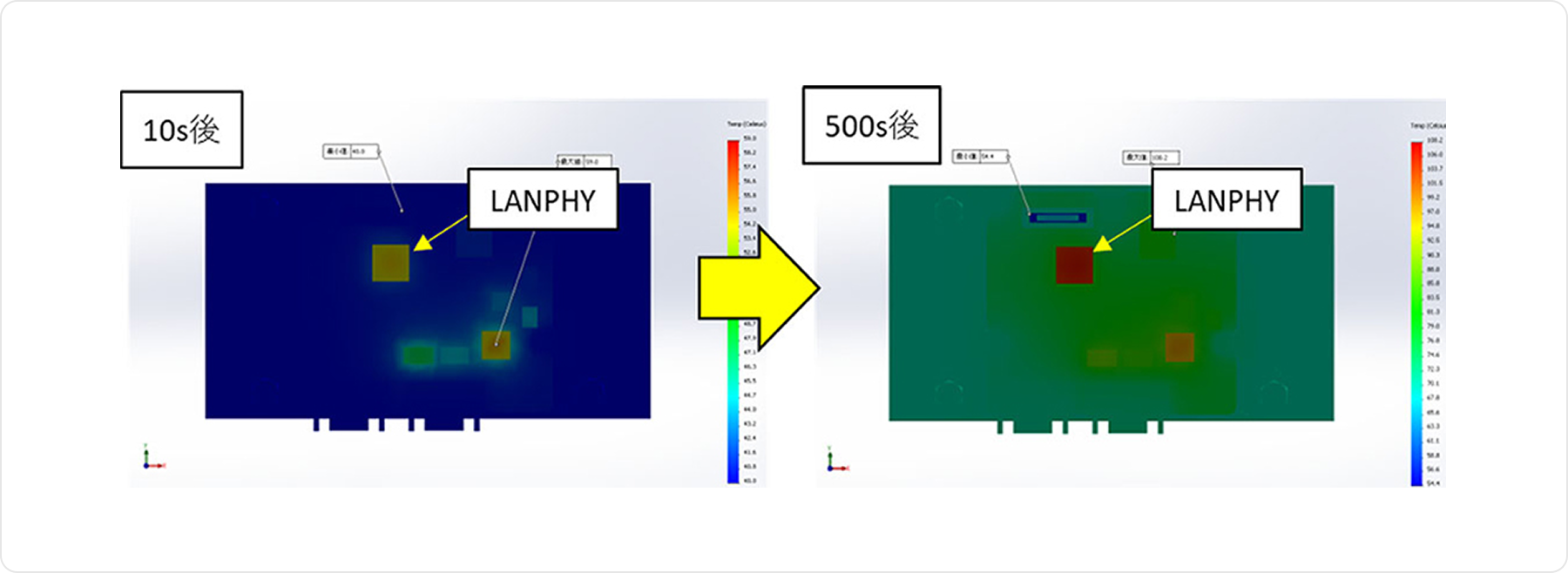
前述のとおり、宇宙空間では対流熱伝達が発生しないことに加え、ロケット本体は外部で接触するものが存在しないため、放射伝熱が放熱の手段となる。ただし、ロケット内部は人工衛星などのペイロードやロケットを制御する各機器を保護するために温度制御がなされており(参考文献1)、ロケット外部ほど過酷な環境ではなく、-10~65℃程度の環境である。内部機器は基本的にロケットの構造体に固定されており、固定接触箇所からの熱伝導が主な放熱手段となる。この状況を熱解析に適用する場合、通常の条件とは実施方法を変える必要がある。通常の熱解析であれば、発生した熱を最終的には流体に伝えて外に流すことで放熱を行う条件で算出する。しかし熱伝導で放熱を行う場合、熱を伝える対象となる固体が必要であり、実際のロケット構造体と熱的に近似した解析モデルを作る必要がある。この解析モデルを「ヒートマス」と呼ぶ。ヒートマスは内部機器と熱伝導を行う範囲でのみ接触し、ロケット構造体と同等の物性値を持つ。ヒートマスの体積は、実際のロケット内部で周囲に設置されるほかの機器を考慮したうえで、解析対象の機器の熱量を吸収する分を割り出して設定する。図1にヒートマスのイメージ、図2に熱の流れを示す。
(3)動作中に環境が真空へと変化する。
ロケット内部の機器は、ロケット打ち上げの前から稼働しており、温度上昇はその時点で始まっている。この段階ではまだ地上にあるため、機器周囲および内部には空気が存在し、機器内の熱は熱伝導および対流熱伝達によって移動する。ロケットが打ち上げられると、高度の上昇に伴い気圧が低下し、機器周囲の空気は徐々に薄まる。ロケット用機器は誤動作や故障のリスクを低減させるために、導電性コンタミ(主に繊維状の異物)が内部に入り込まない程度に密閉性を保ちながら、急激な気圧の変化でも破損しないように内部気圧の調整構造が設けられている。したがって、機器周囲の空気が薄まると同時に内部の空気も薄まり真空状態となる。この状況を熱解析に適用する場合、時間の経過に応じて周囲空気が減少していく条件を正確に計算するのは困難である。そのため、真空中に最初から置かれているという最も厳しい条件で解析して破損する温度に到達しなければ、空気中では温度が下がる方向なので問題ないと判断できる。
非定常熱解析
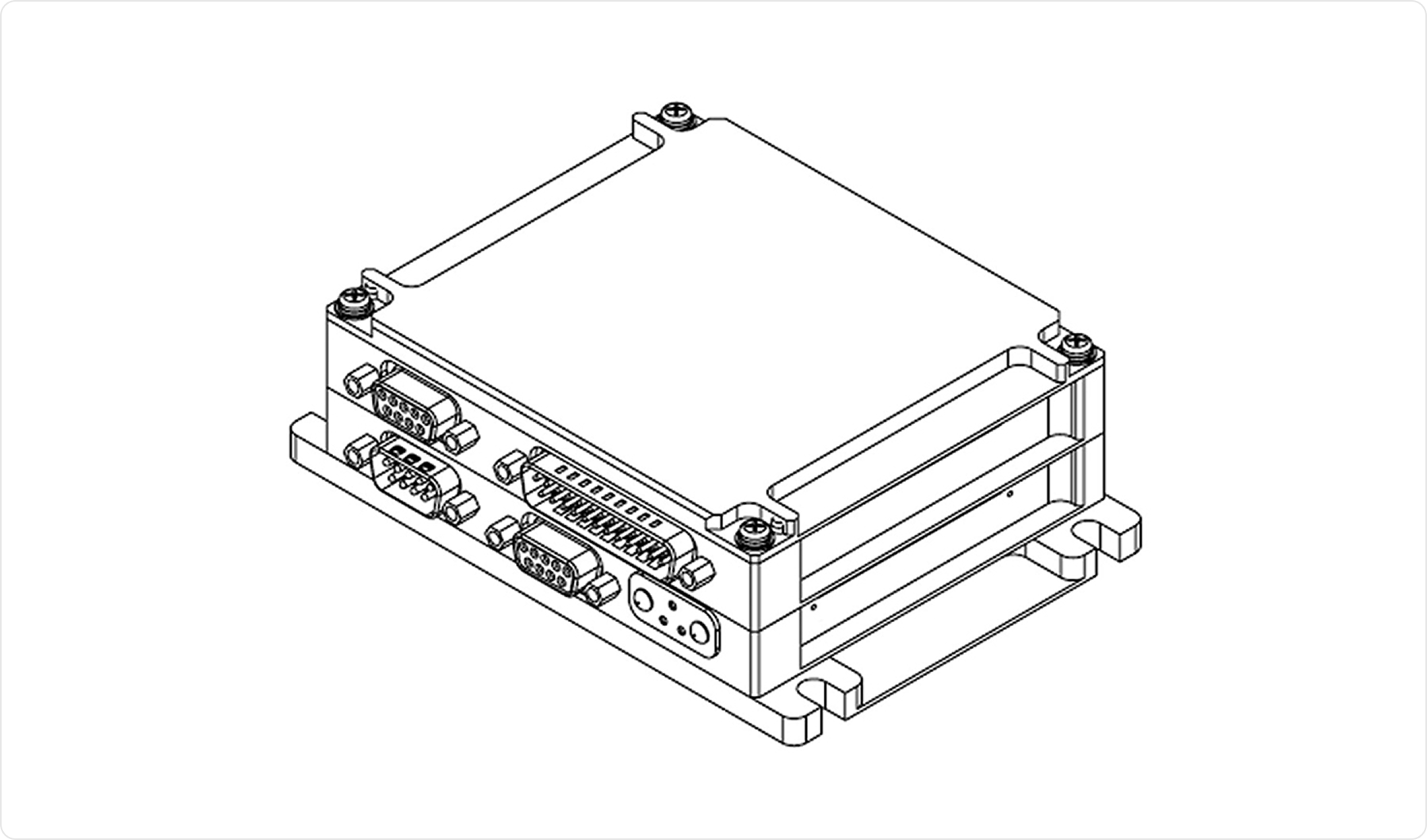
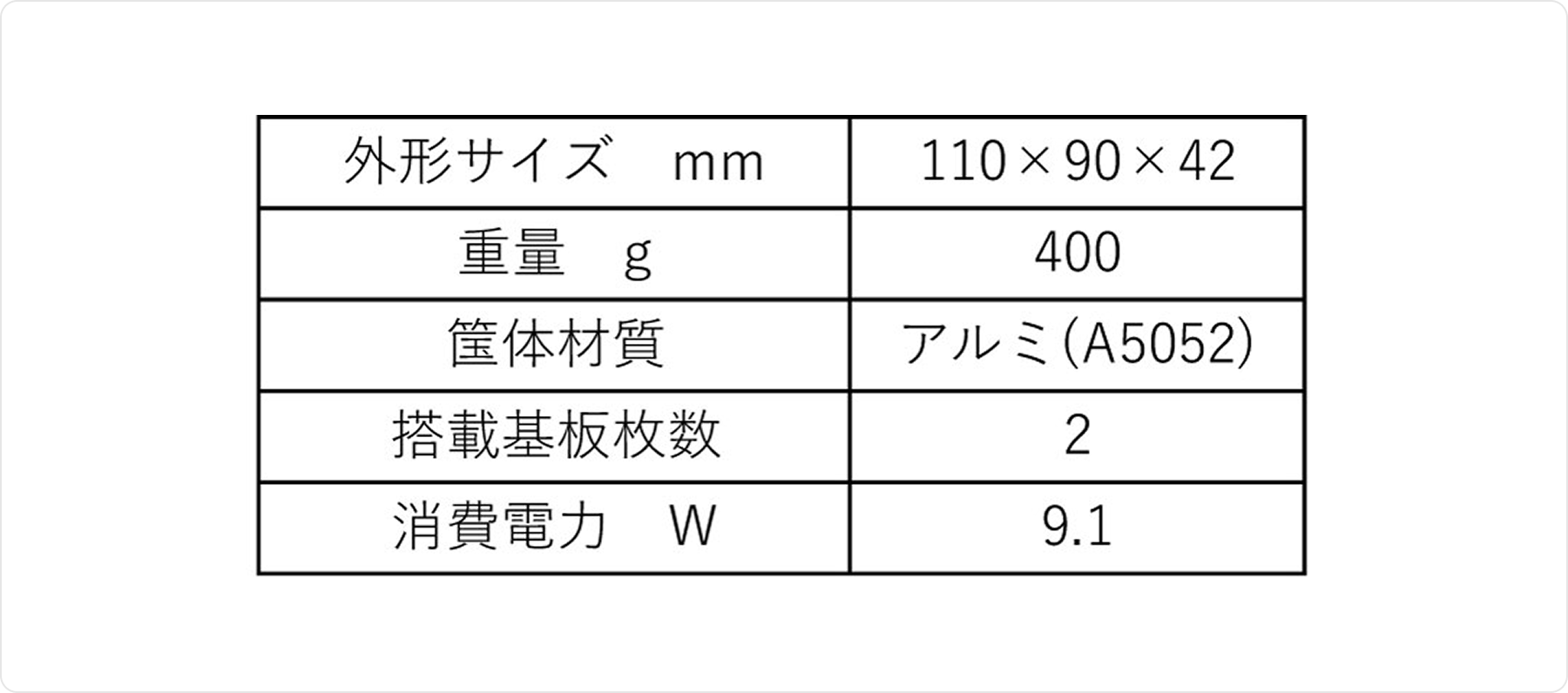
ここからは、実際の解析事例を紹介する。今回熱解析を行ったのはアビオニクスシステムの一部で使用される計測通信系の機器である。図3に計測通信系機器の外観、表1に計測通信系機器の仕様で熱解析に関連する項目を抜粋したものを示す。
今回の解析には、SOLIDWORKS® (注1)Simulation 2017を使用した。材料の物性値は基本的に解析ソフトの標準ライブラリーにあるものを指定したが、基板は独自にモデル化を行い、熱伝導率を計算により求めた。基板は主に熱伝導率の低いガラスやエポキシ樹脂、および熱伝導率の高い銅で形成される。銅はパターンとして層状に配置されるため、基板全体で見ると平面方向には熱を伝えやすく、厚み方向には熱を伝えにくい異方性の熱伝導率を持っている。また、基板に多数存在するスルーホールは厚み方向に銅をつないでいるため、その箇所は局所的に厚み方向の熱伝導率が高くなる。そこで、基板の各層の厚みやガラス・エポキシ樹脂・銅の割合、単位面積あたりのスルーホールの数量を考慮して熱伝導率を平均化し、平面方向と厚み方向それぞれに一律の熱伝導率を持たせた簡素化モデルを作成した。
そのほか、解析で設定した項目を、表2に示す。
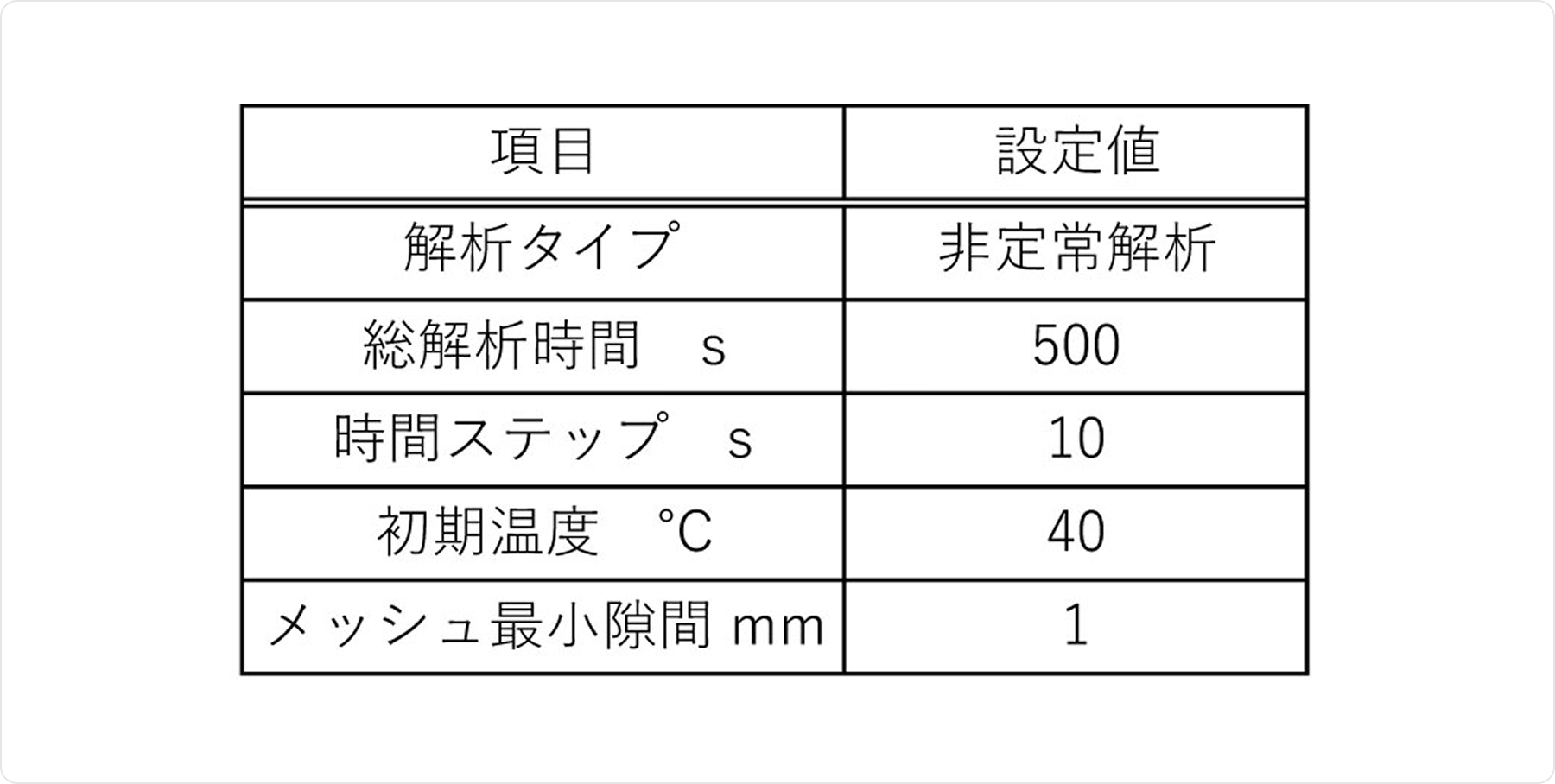
最後に、ヒートマスの温度条件について、今回は異なる状況を想定した2パターンで解析を実施した。
(1)ヒートマス初期温度40℃、温度可変
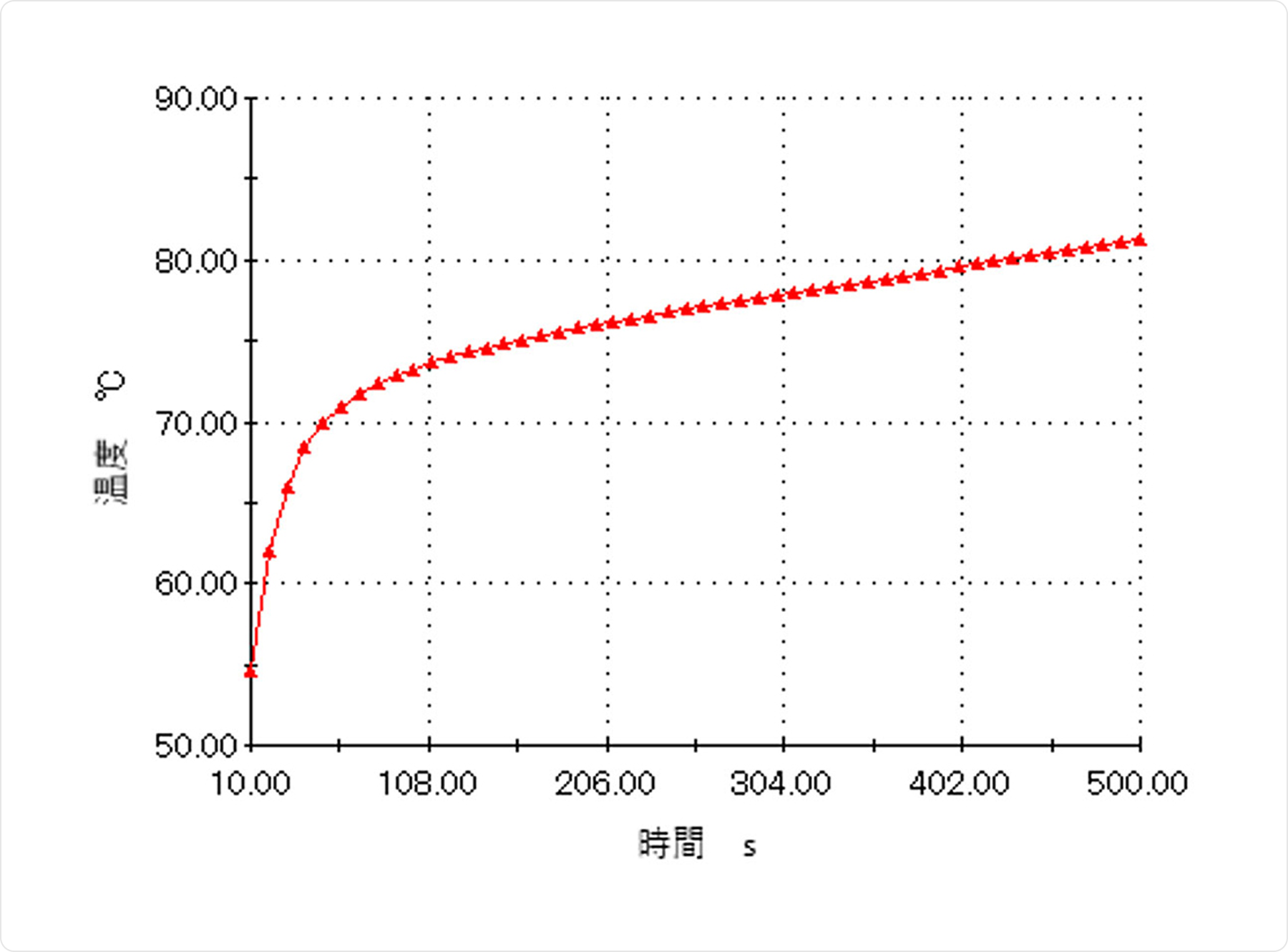
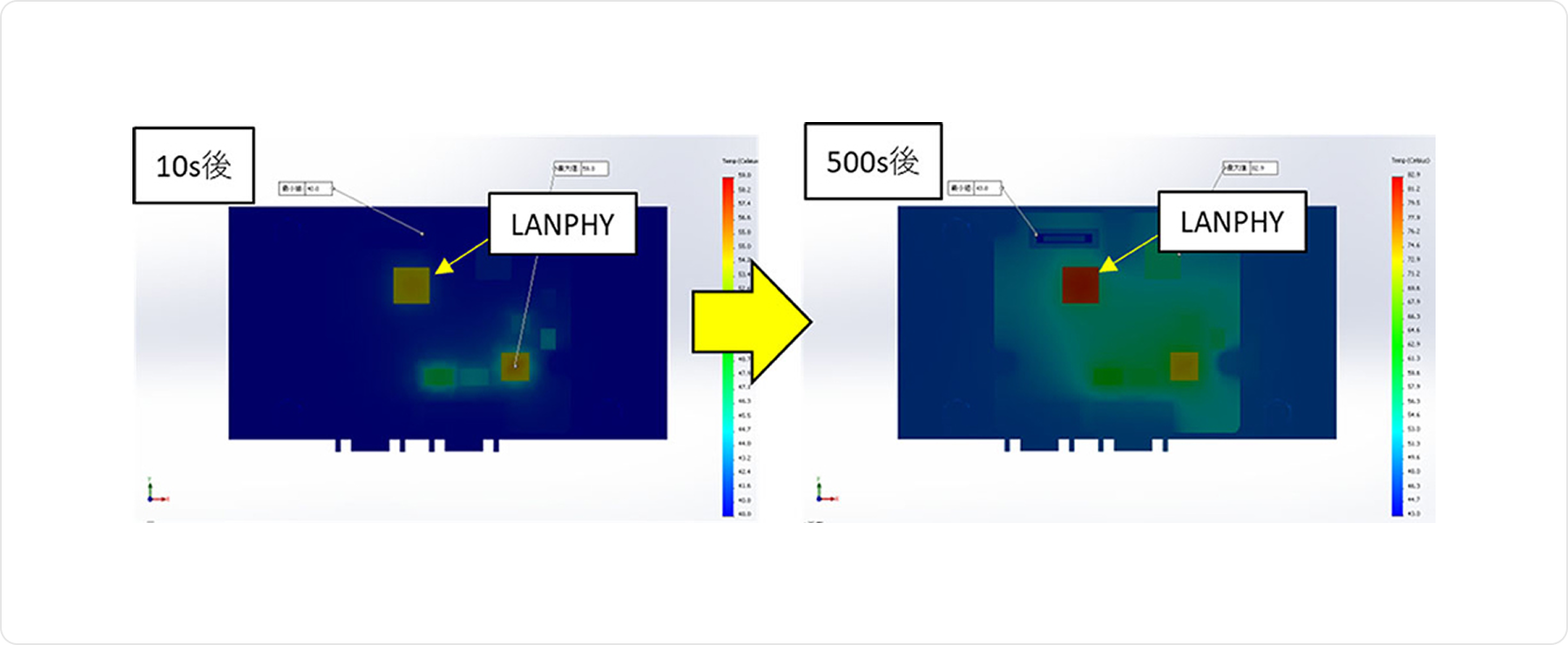
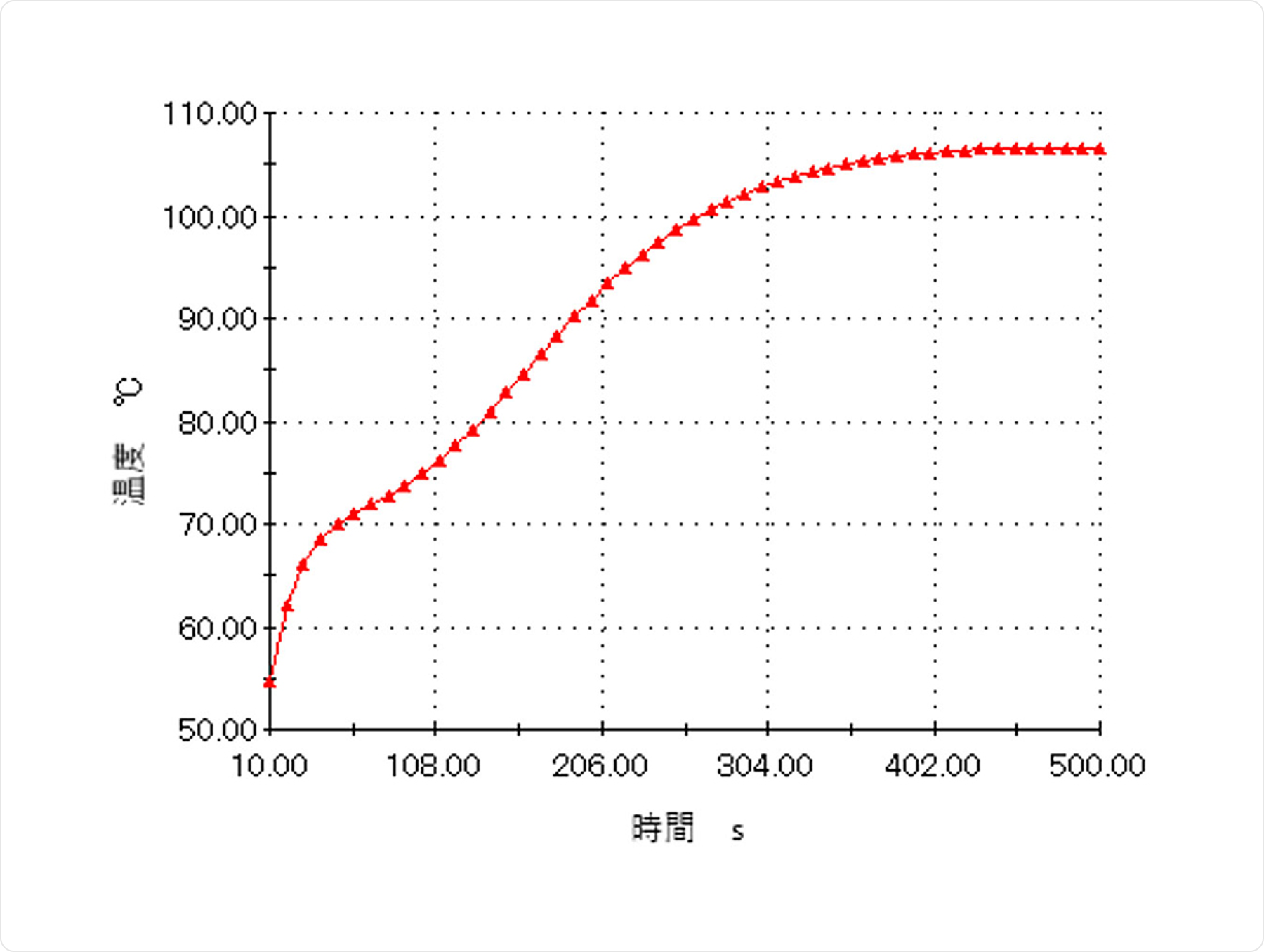
この条件は、周囲のほかの機器が動作せず、解析対象の機器のみを稼働した場合を想定している。ヒートマスは解析対象の機器の熱のみを吸収して温度上昇していく。周囲の影響を考慮しないので条件としては最も緩いが、単独動作での温度上昇を把握するための基礎データとなる。解析結果で最も温度が上昇したLANPHY部について、図4に温度解析結果、図5に温度分布変化を示す。
(2)ヒートマス初期温度40℃、上昇温度指定
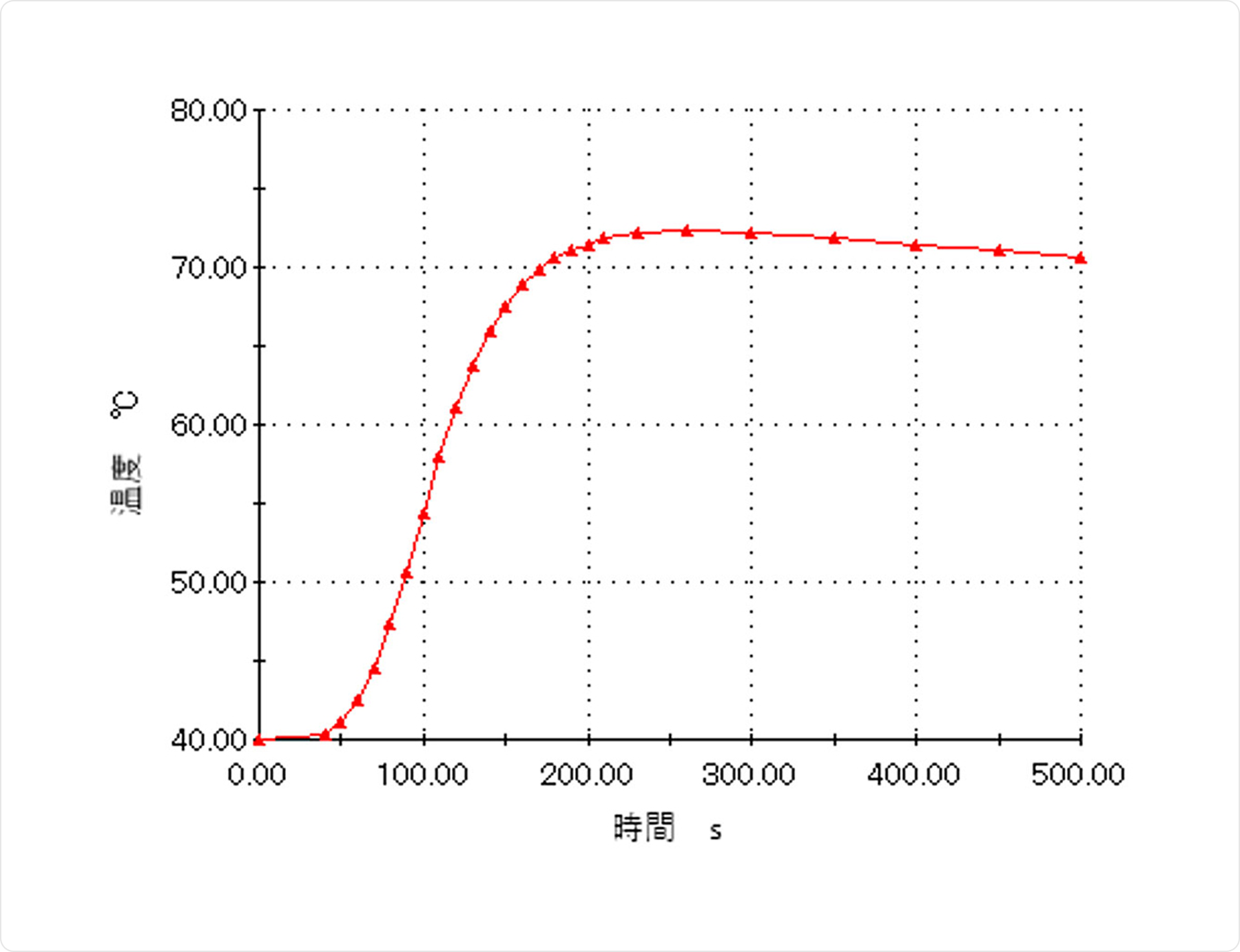
この条件は、ヒートマスの温度上昇を時間で変化させることで、周囲のほかの機器の影響でロケット構造体の温度が上昇することを再現しており、(1)よりも厳しい環境でのデータとなる。ヒートマスの温度設定を図6に示す。ヒートマスの温度は、解析対象の機器から吸収した熱には影響されず設定値のまま推移する。
解析結果として(1)と同様にLANPHY部について、図7に温度解析結果、図8に温度分布変化を示す。
(1)および(2)より、LANPHY温度は許容温度を超えないことが確認でき、追加熱対策の必要がないと判断した。そのほかのデバイスも同様に確認し、機器全体で問題ないことの確認ができた。
実測値との比較
解析結果の検証を行うために、試作機を用いて温度上昇測定を行った。真空環境で測定するために、デシケーターに試作機をセットし、真空ポンプでデシケーター内の気圧を下げて測定した。図9に温度上昇測定環境の写真を示す。

試験時の真空度は、約5kPaの低真空にて実施した。(参考までに、大気圧は101.325kPaである。)温度測定には熱電対を使用し、データロガーを用いて10s間隔で温度を測定した。また環境温度は、地上では機器周辺や機器吸気口の空気温度を基準とするが、今回はヒートマス温度を基準とした。測定開始直前のヒートマス温度は24.6℃で、熱解析と同様に通信動作開始から500s経過までの温度測定を行った。
次に解析結果と測定結果を比較する。比較対象とした熱解析は、今回の温度上昇測定と条件が同じである(1)のヒートマス温度可変の解析結果とした。基準温度は、熱解析では40℃、実際の測定では24.6℃のため、差分の15.4℃を実測値に加えることで調整した。
LANPHYの温度上昇解析結果と実測値の比較を図10に示す。図10より、解析結果に対して実測値が約8℃低いことが分かる。この差が発生した要因として次の2点が考えられる。1点目は、解析でデバイス発熱量を多めに設定していることである。熱解析で設定する発熱量は理論上の最悪値を使用するため、実際の動作での発熱量が低かった可能性が高い。2点目は測定を低真空状態で実施したことで、わずかながら対流熱伝達が発生していた可能性があるからと考える。
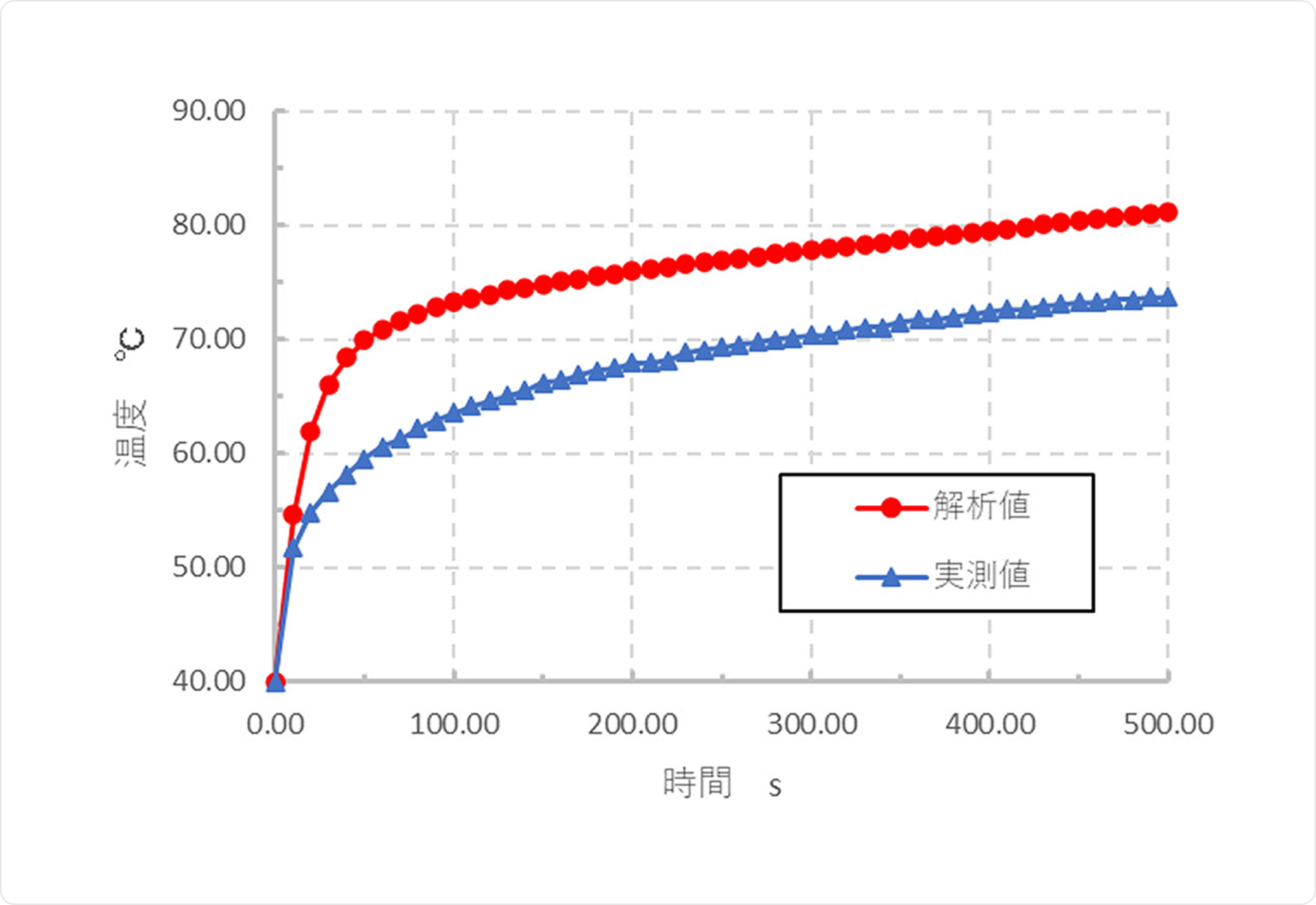
実測値でも機器全体で許容温度を超えないことが確認でき、追加熱対策の必要がないと判断した。
真空環境での熱対策時の注意点
今回の開発では追加対策なしで許容温度内に収まったが、実際の開発では許容温度に収まらない状況が発生しうる。特定のデバイス温度を下げたい場合、地上の機器であれば冷却FANの追加や風量アップ、ヒートシンクなどの放熱部材追加で対応可能であるが、真空中で使用する機器ではこの方法は使えない。図2で示したように熱伝導でデバイスの熱を筺体に伝える必要があるため、発熱量の多いデバイスはあらかじめ基板固定部に近い箇所に配置するか、伝熱部材を介して筺体に直接接触できるような配置にすることを考慮する必要がある。
今後の予定
今回は真空中での非定常熱解析を実施した事例を紹介した。熱解析はさまざまな分野で必要な技術であり、今後も実測値との比較も含めて多様な熱解析の事例を蓄積していく予定である。直近では、水冷方式の熱解析が未だに実績がなく、手順確立に向けて検討を進めている。
参考文献
(参考文献1)板垣春昭:宇宙における熱問題、真空(Journal of Vacuum Society of Japan)、38巻、6号、pp.574-575、1995年
筆者紹介
殿岡直哉:Naoya Tonooka. 株式会社OKIアイディエス開発部
藤野啓一:Keiichi Fujino. 株式会社OKIアイディエス開発部
用語解説
ペイロード
ロケットによって打ち上げられる宇宙機やそれらに乗せられるさまざまな器具や物品のこと。
コンタミ
コンタミネーション。本来混入するべきでない物質が混入した場合を指す。
アビオニクス
飛行のために使用される電子機器の総称。航空(アビエーション)と電子機器(エレクトロニクス)から合成された用語。
(注1)SolidWorksは、Dassault Systemes Solidworks Corporationの登録商標です。
