LiDARセンシング技術
インフラ設置されたLiDARで歩行者や走行車両をリアルタイムに計測し、 交通インフラを利用する人々の安全を守る
関連キーワード
三次元車両計測 / 点群処理技術 / キャリブレーション技術 / コンピュータジオメトリ / 路側協調センサー / 自動運転支援 / 駅ホーム転落検知
技術概要
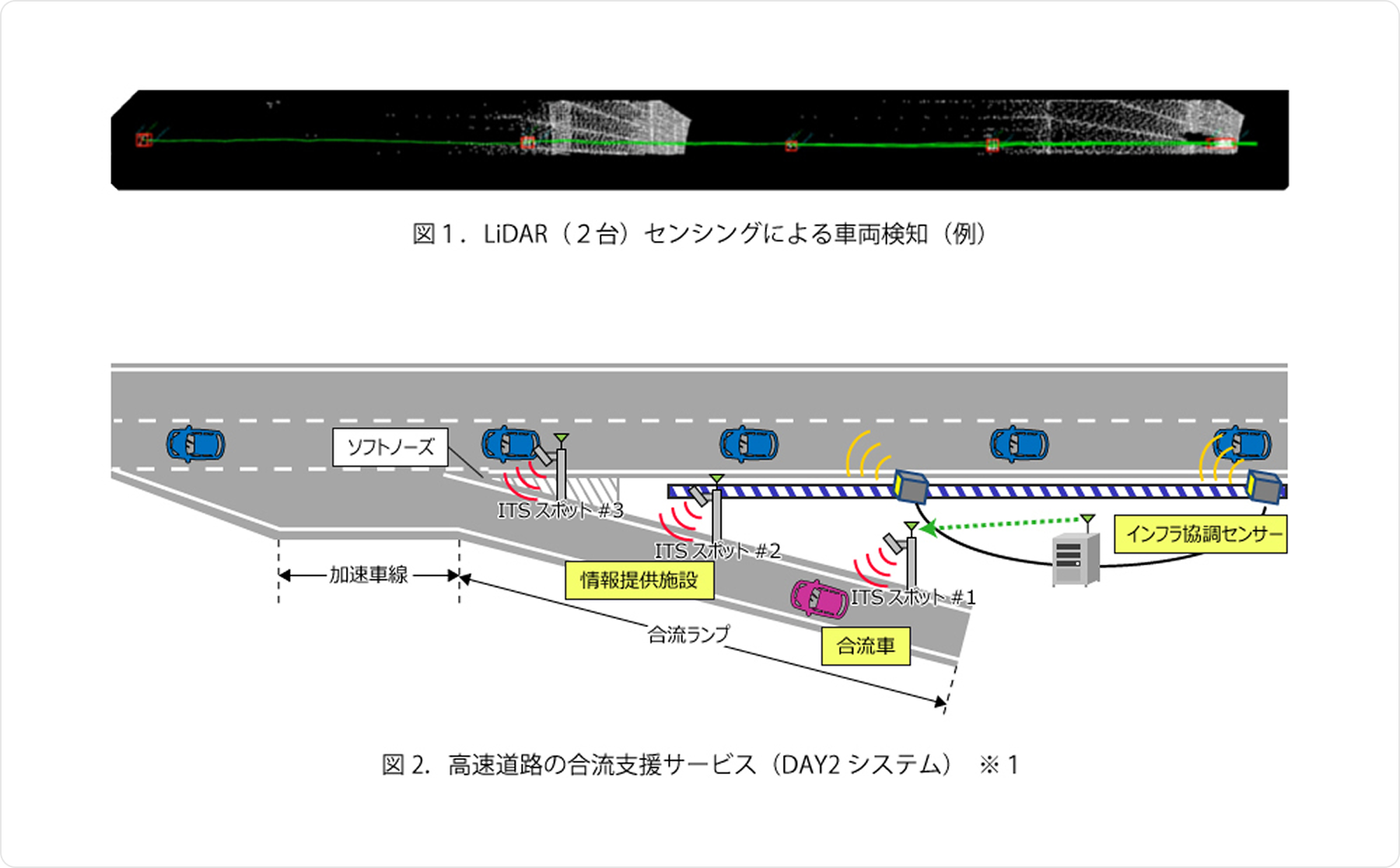
交通インフラ(道路や駅ホームなど)に設置したLiDAR(レーザーセンサー)の高密度点群から移動体(歩行者や走行車両等)をリアルタイムに検出・追跡し、三次元空間(地図)上の位置や大きさを高精度に計測する技術の研究開発を行っています。
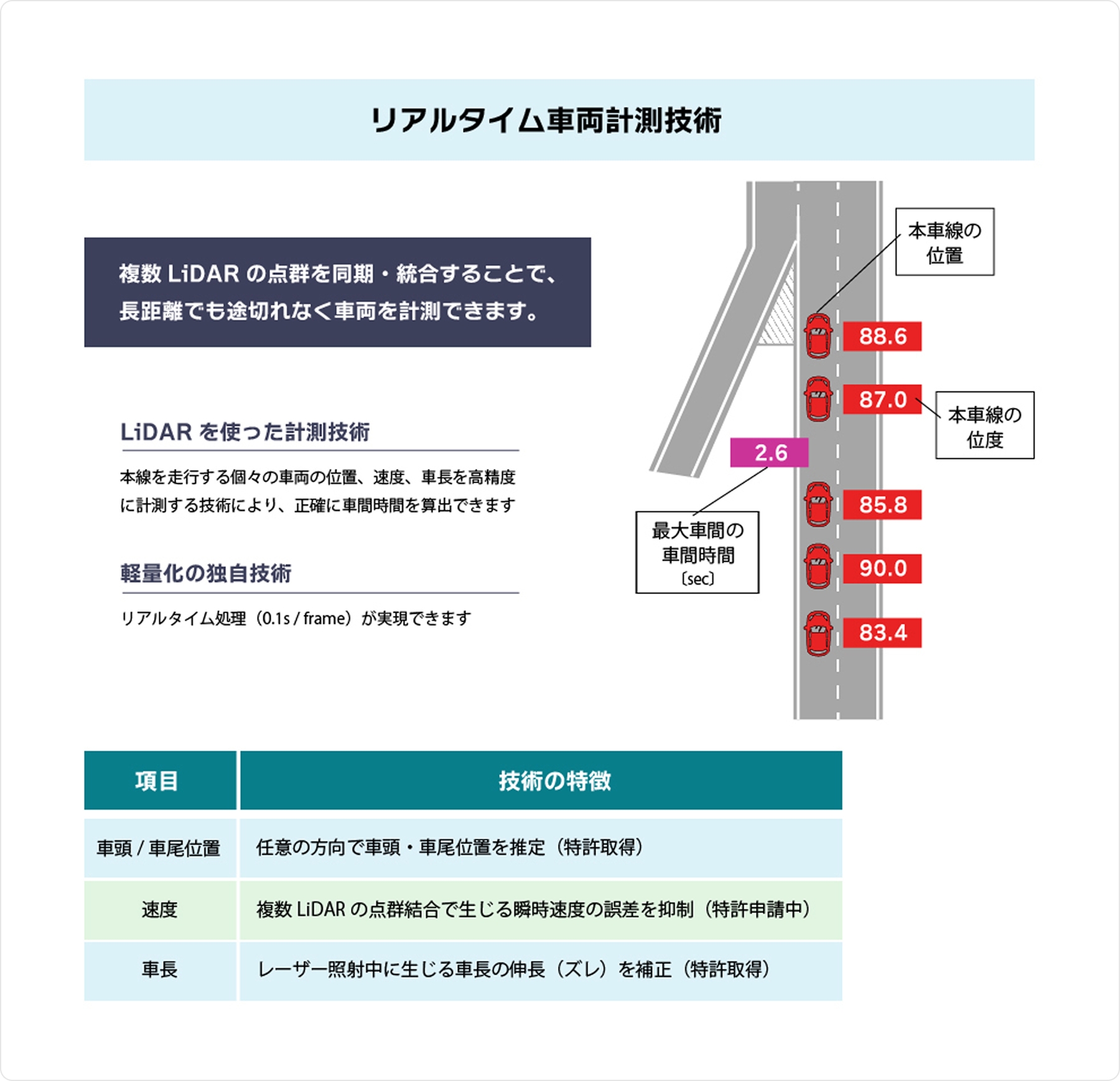
本技術を応用すると、走行車両の速度や車長を計測したり、高速道路や一般道の基準地点(たとえば合流地点や右折地点)に車両が到達する時刻を予測することができます。
また、GPS・GNSS測位技術やIMU(Inertial Measurement Unit)などの多種・多様なセンサーとLiDARとを連携させ、道路や線路をモデリングしたり、センサー間の位置合わせ(キャリブレーション)をしたりする技術の研究も行っています。
※IMUとは…三次元の角速度・加速度を高精度に計測する慣性計測装置
OKIならではの強みはなにか?
高密度点群のリアルタイム処理実装技術や複数台LiDARの高精度キャリブレーション技術、そしてコンピュータ・ジオメトリ技術を活用した点群処理アルゴリズムが挙げられます。
この技術は、長距離を高精度に計測する技術が求められる交通インフラ分野がターゲット市場です。
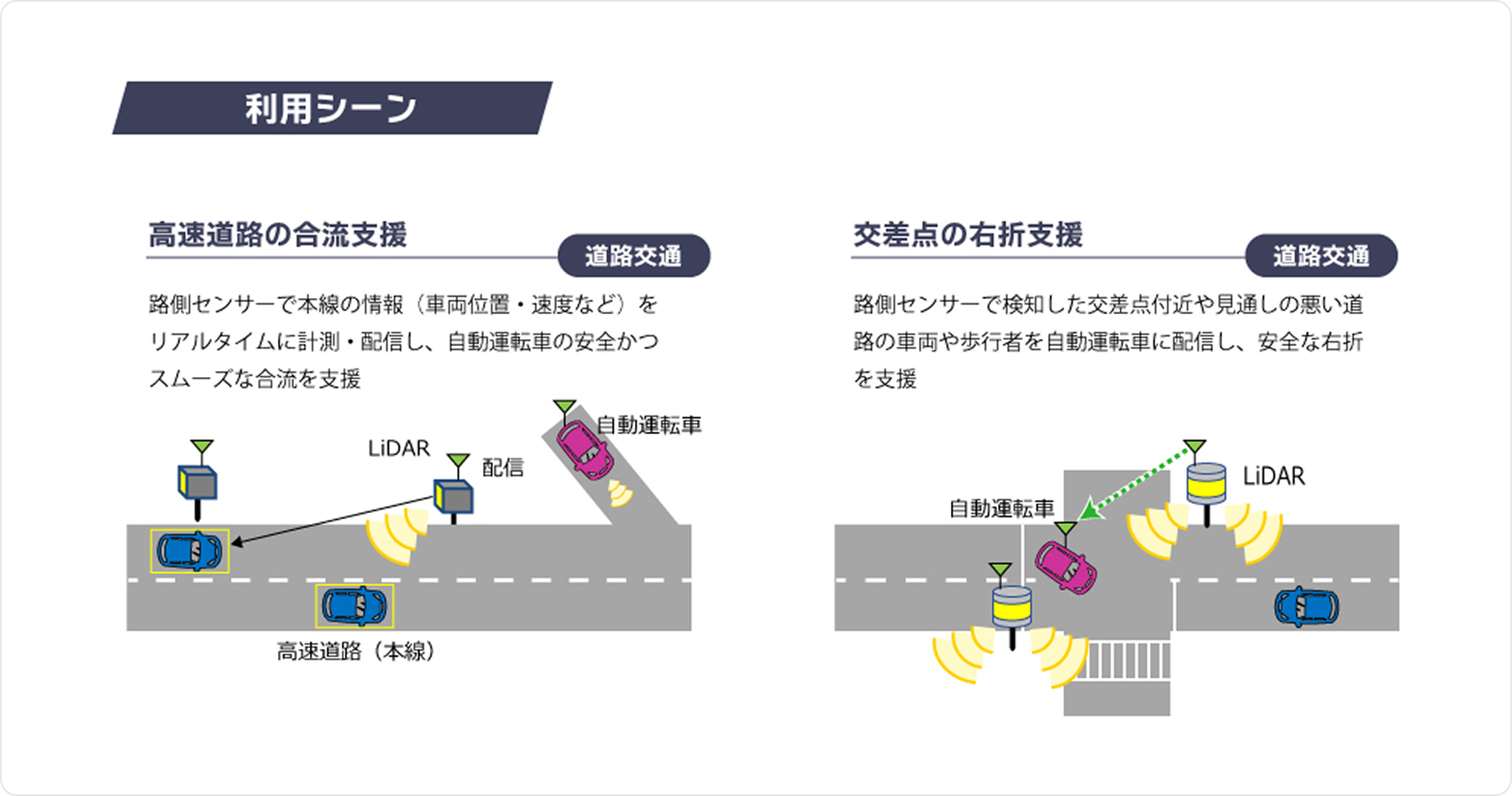
道路交通分野においては、自動運転車の車載センサーでセンシングできない合流先道路や見通しの悪い道路を監視する路側センサー市場と、OKIの通信技術と路側センサーの機能を有する自動運転向け路側機の市場を想定しています。
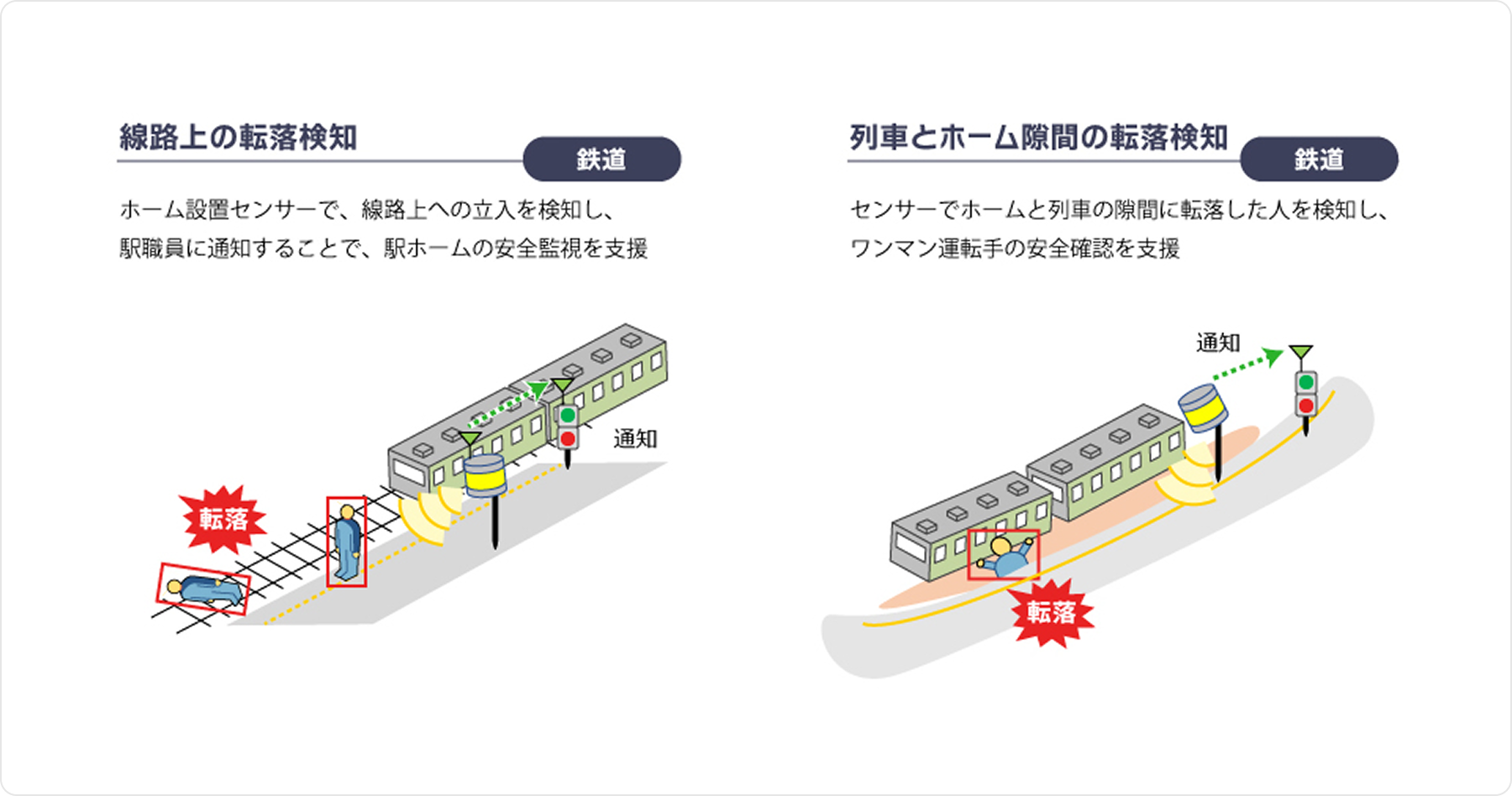
鉄道分野においては、転落検知マットやホームドアの機能を代替する転落検知用途のセンサー市場を想定しています。
今後のビジョン
高精度地図や3Dシミュレーション技術を活用し、計測精度評価やセンサー設置設計の効率化を図り、LiDAR技術の社会実装を加速していきたいと思っています。 さらに、V2X無線通信技術や光ファイバー技術と連携し、広域なエリアでも車両や歩行者を検出できるような技術を開発していきたいと思っています。
