Others
OKI Provides SEATEC NEO Stationary Measurement Barge as Demonstration Site to Support Real-Sea Demonstration for Unmanned Underwater Inspections of Offshore Wind Facilities Using AUVs and Other Technologies
Report on the Autonomous Underwater Vehicle (AUV) Demonstration Project Commissioned by the Cabinet Office National Ocean Policy Secretariat

stationary measurement barge
TOKYO, April 7, 2026 -- In collaboration with Toyo Engineering Corporation (President and CEO: Eiji Hosoi, "TOYO"), Nippon Steel Engineering Co., Ltd. (President: Yukito Ishiwa, "NSE"), and FullDepth Co., Ltd. (President: Satoshi Yoshiga, "FullDepth"), OKI conducted field demonstration aimed at unmanned underwater inspection of offshore wind facilities using AUVs (*1) and other related technologies.
The field demonstration using AUVs and other related technologies was carried out aboard SEATEC NEO, Japan's only stationary measurement barge (*2) owned by OKI and located off the coast of Numazu City in Shizuoka Prefecture. Through the testing, a future vision was organized for inspection systems that would reduce risks and support the automation of underwater inspection work for offshore wind facilities, and a roadmap for the practical deployment was proposed. The field demonstration was undertaken jointly by the four companies following their selection for the Cabinet Office National Ocean Policy Secretariat's Autonomous Underwater Vehicle (AUV) Demonstration Project.
Outline of Field Demonstration
In October 2025, field demonstration was carried out aboard the SEATEC NEO stationary measurement barge owned by OKI, using AUVs in combination with ROVs (*3) and ASVs (*4). Underwater section of a test target (*5) were inspected using video imaging and sonar (acoustic surveying) to identify the technical and operational challenges—such as how to inspect seabed areas and what operational framework would be needed—aimed at achieving unmanned and autonomous underwater inspection of offshore wind facilities. For more information on the background to the field demonstration, footage from the testing, and detailed results, please see the promotional video.
(©Toyo Engineering Corporation)
Proposed Roadmap Toward AUV Practical Deployment
Based on the challenges identified through the field demonstration, future inspection systems envisioned for 2030 and 2040 were examined with the aim of improving efficiency and reducing the cost of underwater inspection of offshore wind facilities. The division of roles and optimal deployment of AUVs and other marine robotics were organized, including system configurations that combine ASVs and AUVs to enable wide-ranging inspection work autonomously and without human operators. In addition, milestones toward early practical deployment, including those for technology development, verification, and long-term implementation testing, were organized and proposed as a roadmap toward 2030.
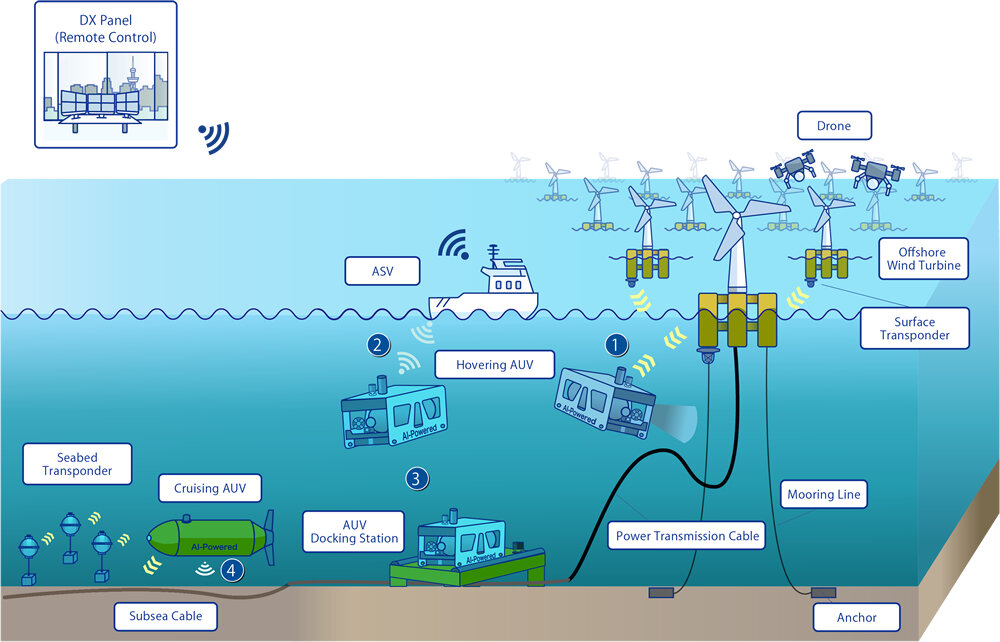
utilizing AUVs and marine robotics envisioned for 2040 (illustration : ©Toyo Engineering Corporation)
① A Hovering AUV recognizes its underwater self-position with positioning support from surface transponder, performing inspection tasks on mooring lines, power transmission cables, and other underwater facilities.
② The ASV receives inspection data from the AUV via underwater communication and transmits it to a DX panel.
③ When its battery level is low, the AUV autonomously moves to AUV docking station for charging and data communication.
④ A Cruising AUV recognizes its underwater self-position with positioning support from seabed transponder, inspecting the condition of subsea cables using sonar, etc.
OKI's main initiatives
Providing Demonstration Sites Including SEATEC NEO Stationary Measurement Barge and Support for Testing
OKI provided its SEATEC NEO stationary measurement barge as the demonstration site. Together with Oki Com-Echoes Co., Ltd. (President and CEO: Ryuji Otsuka, "OKI Com-Echoes"), the OKI Group company handling marine acoustics-related businesses, OKI supported the planning and execution of the testing in the coastal waters around Uchiura Bay in Numazu City, where the barge is moored. The barge's mooring chains were used as targets for the underwater inspection demonstration to simulate the environment of the foundation structures of wind facilities. This contributed to clarifying the field suitability and inspection accuracy of robotics technologies that combine AUVs, ROVs, and ASVs.
Organizing Technical Elements and Operational Requirements for Underwater Infrastructure
OKI used the results of the demonstration testing to systematize technical elements and operational requirements for the underwater infrastructure (including underwater reference points, power supply and charging equipment, and communication systems) essential for the smooth operation of AUVs and other related technologies and for future autonomous and unmanned operations. Furthermore, OKI identified issues related to infrastructure construction, including reference point installation to enable high-precision autonomous navigation, underwater power supply equipment to ensure operational continuity, and defining the requirements for underwater-surface-land communication systems capable of meeting diverse information transmission needs, and organized these as topics for future consideration.
Future Outlook
OKI aims to establish an operational platform that delivers high availability, reliability, and efficiency by drawing on knowledge gained through the development and verification of underwater infrastructure technologies for offshore wind power-related inspection and maintenance operations using AUVs and other related technologies. OKI is also committed to supporting long-term implementation testing and iterative verification of AUVs and other marine robotics through its real-sea maritime test environment infrastructure and the provision of OKI Com-Echoes' Maritime Test Engineering Service, which supports all phases of testing from test planning and safety management to execution and data acquisition. Furthermore, based on the demonstration results, OKI will work to promote the standardization of underwater infrastructure and expand collaboration with other business fields, thereby contributing to the development of the marine industry as a whole, including the offshore wind power sector.
References
Below are the roles and detailed activities of each company.
- TOYO:
Overall project coordination, consolidation of implementation issues and roadmap development, studies on service provider models and marine data platforms - NSE:
Coordination of the field demonstration, identification of operational challenges for deployment of and other marine robotics, studies on service provider models and marine data platforms - FullDepth:
Provision and operation of the ROV "DiveUnit 300 Lite", identification of technical challenges in developing AUVs and related marine robotics
Terminology
*1: AUV (Autonomous Underwater Vehicle)
An unmanned underwater vehicle that autonomously moves by recognizing its own position and surrounding conditions. The Tri-TON AUV, developed by the Maki Laboratory at the Institute of Industrial Science, University of Tokyo, was used in this field demonstration.
*2: Barge
A flat-bottomed vessel used to carry heavy cargo within ports which is typically towed by a tugboat. Although OKI's underwater acoustic measurement facility is a stationary non-navigating installation, it is referred to as a barge due to its flat-bottomed hull shape.
*3: ROV (Remotely Operated Vehicle)
An unmanned underwater vehicle that dives underwater via remote control. The DiveUnit 300 Lite manufactured by FullDepth was used in this field demonstration.
*4: ASV (Autonomous Surface Vehicle)
An unmanned vessel that navigates on the water surface via autonomous control. The small Eight Knot I vessel, equipped with the Eight Knot AI CAPTAIN autonomous navigation platform developed by Eight Knot Inc., was used in this field demonstration.
*5: Test target
The underwater sections of OKI's stationary measurement barge SEATEC NEO were used as test targets in this field demonstration.
Related links
-
Japan Cabinet Office's AUV Demonstration Project (Japanese only)
-
Selected for Japan Cabinet Office's AUV Demonstration Project
About Oki Electric Industry (OKI)
Founded in 1881, OKI is Japan's leading information and telecommunication manufacturer. Headquartered in Tokyo, Japan, OKI provides top-quality products, technologies, and solutions to customers through its Social Infrastructure, Network Infrastructure, Defense Systems, Financial & Payments Solutions, Component Products, Electronics Manufacturing Services, and Advanced Components businesses. Its various business divisions function synergistically to bring to market exciting new products and technologies that meet a wide range of customer needs in various sectors. Visit OKI's global website at https://www.oki.com/global/.
- Oki Electric Industry Co., Ltd. is referred to as "OKI" in this document.
- The names of the companies and products mentioned in this document are the trademarks or registered trademarks of the respective companies and organizations.
