内閣府の「自律型無人探査機(AUV)利用実証試験」に採択
~港から発進して海底をマッピングするAUVと港から発進して目標物を精査するAUV調査~
東京大学生産技術研究所(所長 年吉 洋、以下、東大生研)のソーントン・ブレア准教授は、OKIグループで海洋音響関連事業を手掛ける株式会社OKIコムエコーズ(代表取締役社長 大塚竜治、以下OKIコムエコーズ)および株式会社ディープ・リッジ・テク(代表取締役 浦環、以下ディープ・リッジ・テク)の3者共同で、内閣府総合海洋政策推進事務局が公募した「自律型無人探査機(AUV)利用実証事業」に「港から発進して海底をマッピングするAUVと港から発進して目標物を精査するAUV調査の実証試験」を提案し、同利用実証事業の1つ「その他利用用途ビジネスモデル構築」のカテゴリで採択されました。
本利用実証事業では、自律型無人探査機(AUV:Autonomous Underwater Vehicle)(注1)の社会実装に向けた制度環境の整備やより実用的な製品の開発等に繋げることを目的として、AUVの利活用が期待される場面での実証試験を実施し、AUVの社会実装に向けた取り組みをより効果的・効率的に推進することを目指しています。
背景
地震国である日本では、地震による海底地形の変動とそれに伴う津波が多く発生しています。海底地形の変動を詳細に把握することで、地震や津波の予兆を知ることができます。それには、周辺の詳細な海底地形図の頻繁な更新が不可欠です。また、海底には、送水管やパイプライン、海底ケーブル等人間生活に欠かせないインフラ設備のほか、沈没船や墜落機のような遺失物も存在しています。これらについては、定期的な点検や位置確認などが求められています。しかし、現状では大型船を使った音響装置による地形調査や遠隔操縦式無人探査機(ROV:Remotely Operated Vehicle)(注2)を使う調査等が主流です。
AUVの利点は、人が関与せずに海中活動を行う事にあります。現状では、着揚収と状態監視に複数の人員が必要かつ回収用ボートを使う運用が多いこと、動力源に限りがあり長時間運用ができないことから、調査船等からAUVを展開していますが、調査船なしで運用できれば、調査範囲を広げることができ、傭船費・人件費および環境負荷(CO2排出量)を格段に減らすことが可能となります。
目的
本提案は、AUVを港から発進させることで、多大な負担による制約からAUVを解き放ち、AUV本来の利点を活かそうというものです。東大生研ソーントン准教授の研究チームは、センサーを含めAUVの研究開発を長年にわたり行い、実海域で使うことのできる複数のAUVを開発・所有・運用しています。OKIコムエコーズは、自社の試験フィールド(注3)でのAUVを用いた海上試験において、また、ディープ・リッジ・テクは、AUVの研究・開発および運用ノウハウにおいて豊富な知見・経験を持っています。この3者が、内閣府総合海洋政策推進事務局が立ち上げたAUV官民プラットフォームと協力して、AUVの持つ可能性を検証するために、以下の実証試験を行います。
実証概要
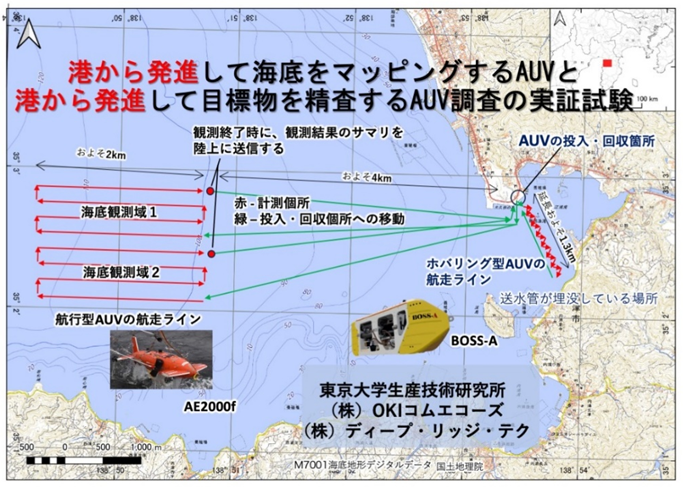
本実証事業では、港から発進するAUVを実現するための第一歩として、調査船の支援なしで2種類のAUVに以下の行動を行わせる実証試験を沼津沖合の試験フィールドにて実施します(下図参照)。
1)航行型AUV「AE2000f」(注4)を港から発進させ、沖合の海底地形等を計測し、自力で港に戻る。これにより、日本周囲において水平分解能の高い詳細な海底地形図が短期間で計測でき、かつ、頻繁に改訂できる可能性を明示します。
2)ホバリング型AUV「BOSS-A」(注4)を港から発進させ、海底に埋設されている人工物を調査し、自力で港に戻る。これにより、海底のインフラ設備や遺失物等の探索・調査は、およその位置が分かっていれば、ホバリング型AUVのみで詳細に調査できる可能性を明示します。
実証実験の期間
2025年12月15日~12月23日(予定)
本実証実験では、見学会も行う予定です。
見学希望者は、11月以降、下記の見学会お問い合わせ先にご連絡ください。
期待される成果
既存のAUV(航行型とホバリング型)が、調査船なしで、港から発進して、調査を行い、再び自力で港に戻ってくるパフォーマンスを示すことで、その有用性と将来AUVが活躍していくための技術課題と必要な環境整備に関する課題等を明らかにします。そして、2040年に向けて、信頼性と技術レベルが高い航行型とホバリング型の実用AUVが開発され、ユーザーの需要に応えた維持管理、そしてAUV市場のビジネスモデルが構築されていくことが期待されます。
用語解説
(注1)自律型無人探査機(AUV:Autonomous Underwater Vehicle)
動力源を持ち、プロペラ等を用いてあらかじめ決められたルートに沿って全自動で海中を観測する装置。ROVのようにケーブルがついていないので、自由な行動ができる。大深度の調査では、ケーブルがついていないことでは、ROVに必要な大きなケーブルハンドリング装置が必要でなく、頻繁なAUV展開が可能である。
(注2)遠隔操縦式無人探査機(ROV:Remotely Operated Vehicle)
有索の無人水中ロボット。ケーブルを通じて、陸上や母船から遠隔で操縦する。海底の画像や情報をリアルタイムで伝送し、複雑な作業を行うことができる。大深度用ROV(ワーククラスROV)では、ケーブルハンドリング装置が大規模となり、大型母船が必要である。
(注3)試験フィールド
本実証試験におけるAUVの着揚収基地は、静浦港土佐谷組ヤード岸壁を借用して実施する。
航行型AUVは、基地から水深100m海域、ホバリング型AUVは、基地から水深50mの送水管敷設エリアを航走する。
試験に際しては、事前に周辺漁協、マリーナ他関係各所へ海上試験のお知らせを実施すると共に、AUVが航走する際は、安全確保のためのAUV水中位置監視船と往来船への注意喚起を行うための警戒船を配置する。
(注4)航行型AUV・ホバリング型
航行型AUVは広範囲を高速(2~4ノット程度)で航行することをミッションとする。ホバリング型AUVは、多くの推進器を持ち運動自由度が高く、海底への接近、定点保持、その場回頭やその場上下運動が可能。調査対象に接近して詳細観測することを主要ミッションとする。
研究に関するお問い合わせ先
東京大学 生産技術研究所 ソーントン研究室
特任研究員 杉松 治美(すぎまつ はるみ)