曲線ホームの安全を支援する3D LiDARを用いた転落検知システムの技術開発
本記事のリーフレット
駅ホームでは毎年2千件を超える転落事故や接触事故が発生している(参考文献1)。国土交通省では、駅ホームの安全性向上のためホームドアなどの整備や駅員による誘導案内・注意喚起などハードおよびソフトの両面からの対策を推進している。さらに、近年では視覚障害者のホーム転落事故防止のため、センシング技術などを活用した対策も推進されている(参考文献2)。転落事故や接触事故の対策としてホームドアが効果的であるが、ホームの構造上の問題、設置・メンテナンスなどのコストの問題などから導入が難しい駅も多い。
OKIでは、ホームドアの課題解決と運行オペレーションの変革(参考文献3)を目指し、鉄道事業社様とともに3D LiDAR(Three-Dimensional Light Detection and Ranging。以下、LiDAR)を活用した駅ホームの安全を支援する転落検知システムの技術開発を進めてきた。
本稿では、お客様の駅で発生していた「曲線ホームでの列車隙間転落」という課題に対処するために研究開発したLiDARセンシング技術について紹介する。
LiDARを用いた転落検知サポートシステムの概要
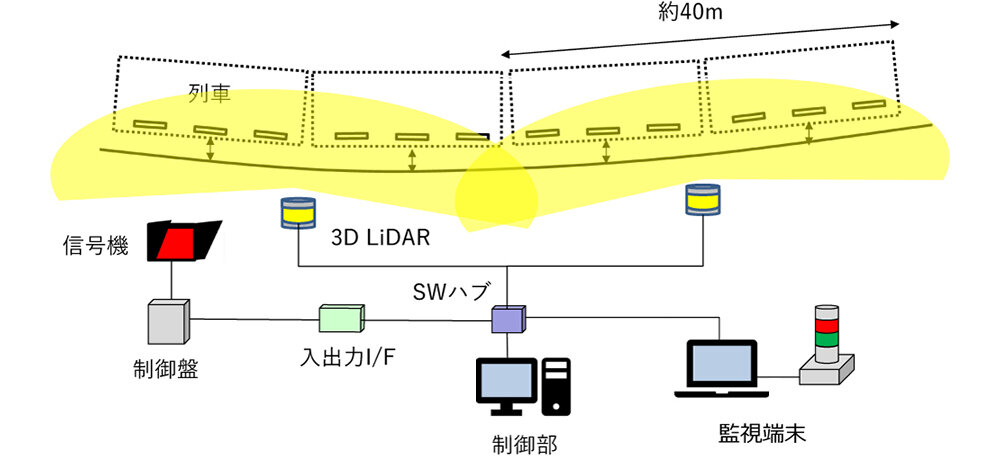
本システムは、主に、ホーム上に設置されたLiDARから得られる3次元点群データを用いて転落判定処理などを実行するサーバー、および、判定結果の表示などを行う装置で構成される(図1)。本システムでは、LiDAR1台で2車両分(約40m)に相当するホーム端周辺エリアの人を検知対象としている。各装置はネットワークケーブルで接続されているため、遠隔地に設置されたサーバーで処理することや、異常発生を駅ホームの信号機だけではなく遠隔地の監視端末などにも通知することも可能である。
本システムは、次の3つの安全支援機能を実現する計画で開発を進めている。
①ホームと列車の隙間への転落検知(在線時)
②線路上への侵入検知(非在線時)
③ホーム上の居残り検知(在線/非在線)
①は入線信号などを利用し、列車が停止してから発車するまでの在線中に列車とホームの隙間に人が挟まっていることを検知する機能である。②は、出線から入線までの非在線時にホームから線路側に立ち入った人などを検知する機能である。③は、たとえば、黄色い点字ブロックからホーム端のエリアにいる人を検知する機能である。これらの検知機能は、駅の構造や運用オペレーションに合わせて、検知エリアの設定や通知のタイミングなどを柔軟に調整することができる設計になっている。なお、①と②は、鉄道事業者様との共創により既に製品化している機能である。③は、現在、当社にて独自開発中の機能である。
LiDARによる駅ホームのセンシング
ホーム端周辺の長いエリアをセンシングするためには、画角が広く、検知距離が長いセンサーを活用すると設置コストやメンテナンスコストの面で有利である。さらに、LiDARを用いて、3次元空間として検知エリア内の人をセンシングすることで、複雑な形状のホームでも高精度に転落を検知することが可能となる。本節では、まず、LiDARのスキャンと分解能について説明し、次に、曲線ホームにLiDARを設置した場合の検知エリアの考え方について説明する。
(1)LiDARのスキャンと分解能(参考文献4)
LiDARは、2次元上に複数のレーザーを同時に照射し、3次元空間上の物体を高精度にスキャン(計測)する装置である。本システムでは、ホーム端周辺の広いエリアをカバーするために、図2に示すような水平方向(Horizontal)と垂直方向(Vertical)に一定間隔でレーザーを照射する水平視野角360°の回転式LiDARを採用している。
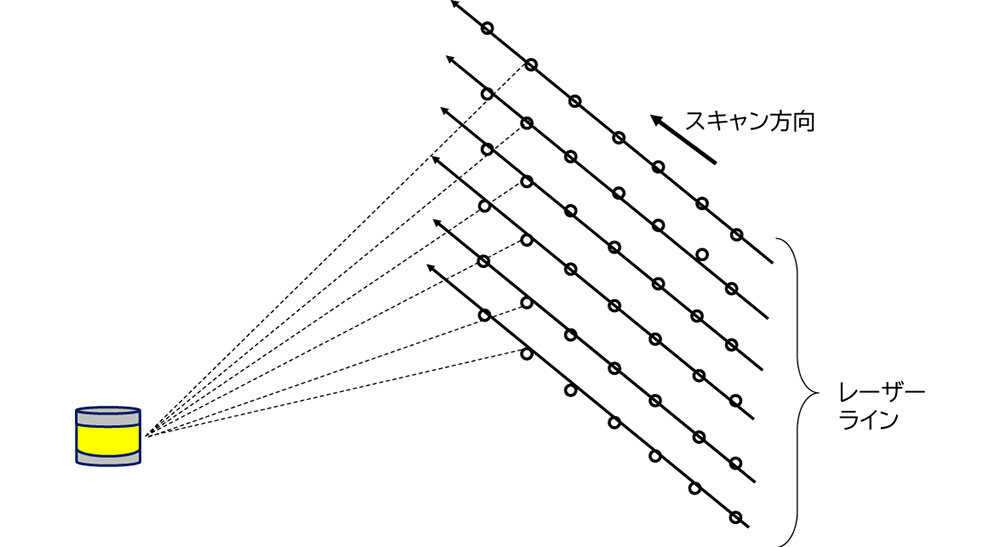
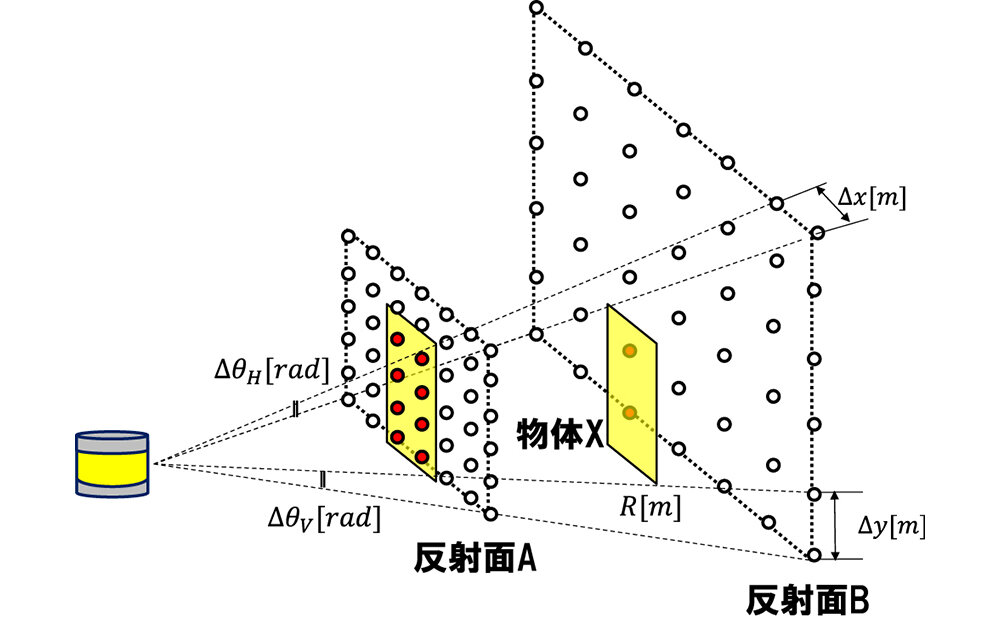
図2のように一定間隔でレーザーを照射するタイプのLiDARでは、式(1)に示すとおり、計測物までの距離が遠くなるほど分解能が低下する(図3)。そのため、LiDARを用いて物体の有無を判別するためには、距離分解能と検知物体のサイズを考慮して、検知可能な距離を設計する必要がある。

(2)曲線ホームの検知エリア
ホーム上にLiDARを下向きに設置して、ホーム端周辺をセンシングする場合のセンサー設置例と検知エリアのイメージを図4と図5に示す。
図4に示すように、ホームの屋根などにセンサーを設置すると、ホーム側と線路側の両エリアを同時にセンシングすることが可能となる。ただし、ホーム端からLiDARまでの距離に依存した死角が、ホーム下に生じることに注意する(参考文献5)。
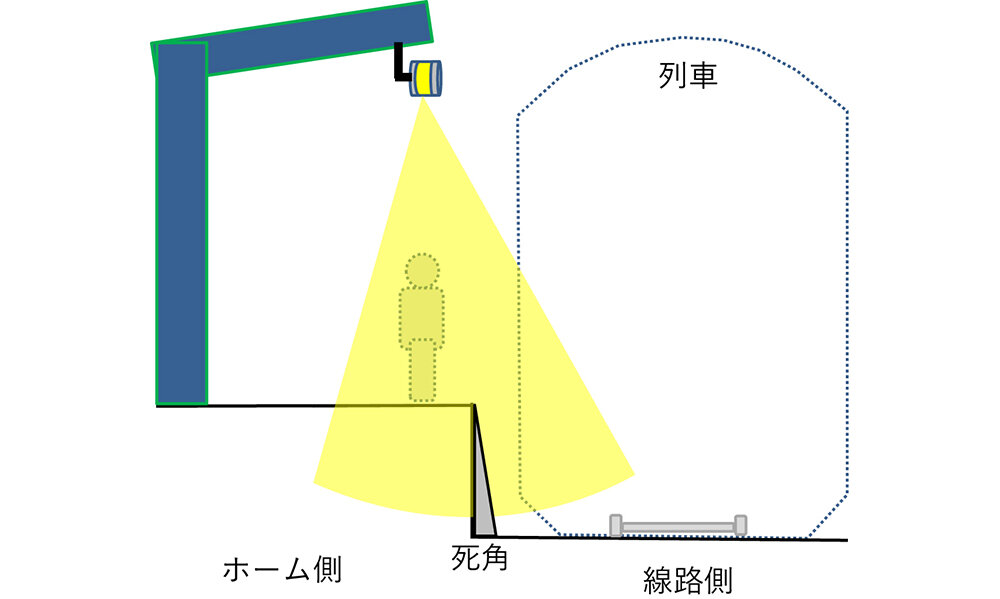
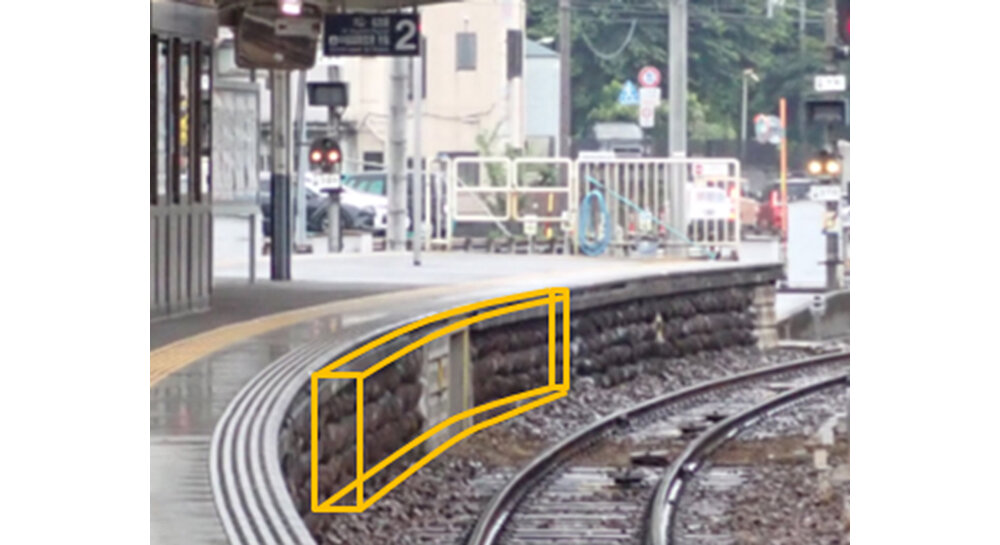
図5は、隙間転落検知機能を曲線ホームで利用する場合の検知エリアのイメージである。列車の乗降者と転落者を適切に判別するために、できるだけ正確にホーム下の隙間エリアを空間的に定義することが望ましい。そのため、曲線ホームではその検知エリアが曲線空間であることが望まれる。この空間として定義された検知エリアを検知エリア空間と呼ぶことにする。
3次元計測技術を応用した転落検知
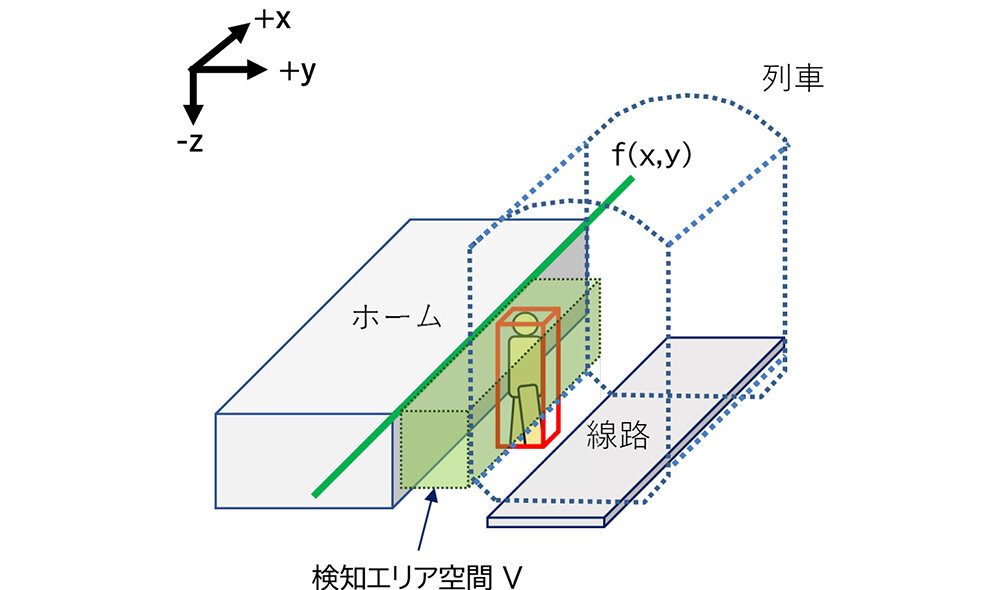
当社では、さまざまな形状のホームで適用可能な転落検知システムを実現するために、RTK-GNSS測位などの測量装置を活用し、LiDAR座標系にマッピングすることでホーム端の全体形状を高精度に推定する技術を研究開発した。図6に、隙間転落検知を利用する際のLiDAR座標系と検知エリア空間との関係を示す。LiDARのx、y、z軸をそれぞれホーム沿い、線路向き、ホーム高の方向にとり、ホーム端形状を関数f(x,y)で表し、zとなす空間をVとして検知エリア空間を定義する。ここでは、ホーム端形状をRTK-GNSS測位データを用いて推定する方法と当社のLiDAR人位置計測技術の精度について説明する。
(1)曲線ホームの形状推定(参考文献6)
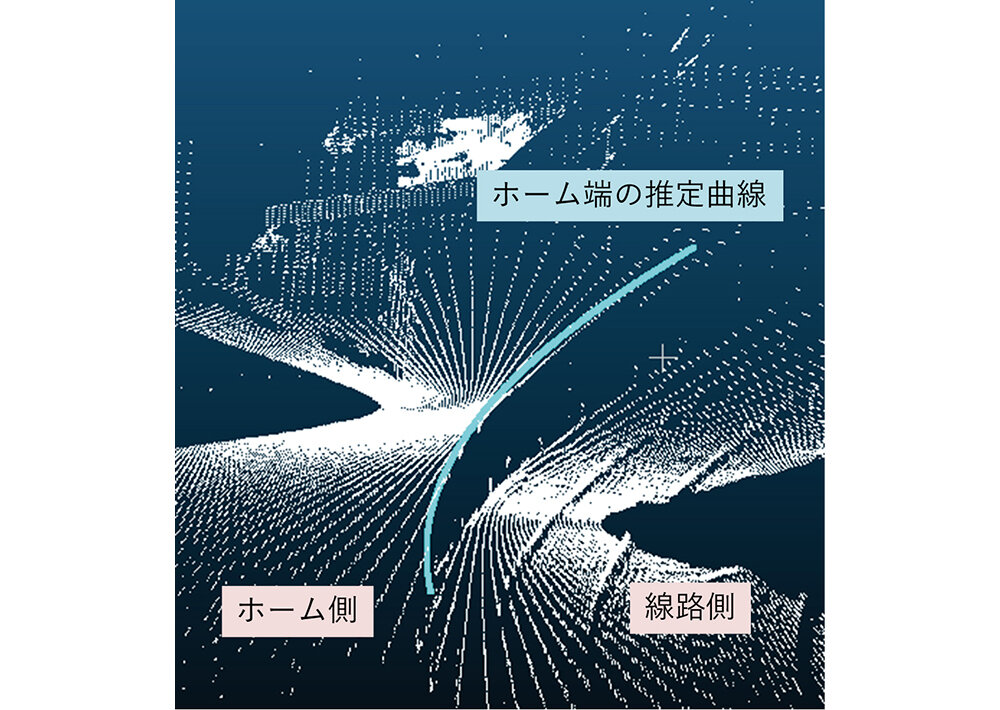
ホームと列車の隙間は、20cm程度であるため、検知エリア空間を定義するためには、センチオーダーでの測量が必要である。そこで、曲線状の屋外ホーム(改札付近のみ屋根あり)の形状を計測するために、RTK-GNSS測位を活用した。ホーム端の計測は、実際のホーム(全長約160m)でGNSSアンテナをホーム端に沿うように動かしながら実施した。この時の測位精度は、FIX解:約90%、FLOAT解:約10%であった。取得した測位データを用いて、ホーム形状を高次多項式で推定し、LiDAR点群上にマッピングした図を示す(図7)。
(2)3次元空間の人位置計測
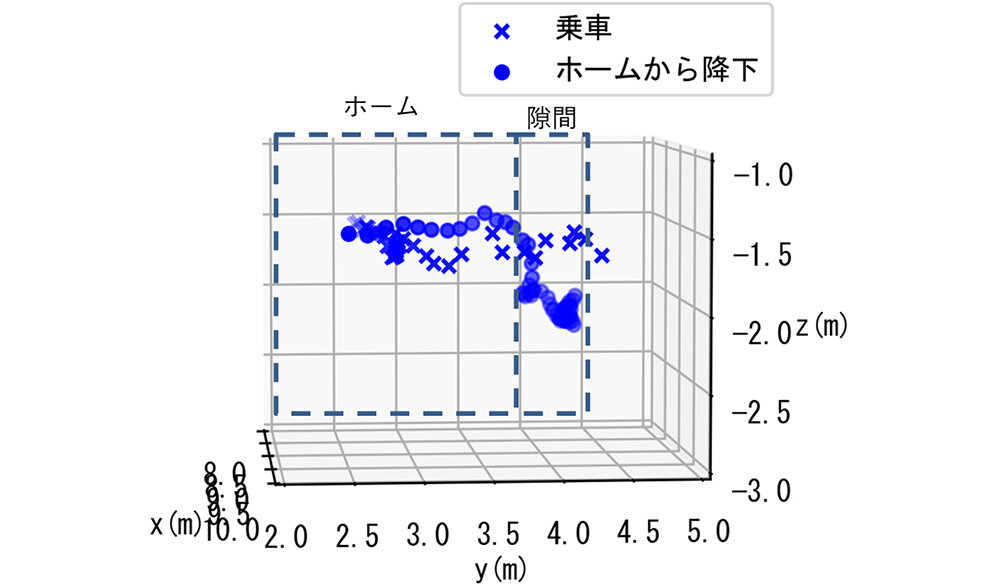
3次元空間で隙間への転落を検知するためには、センチオーダーで人を計測(検知)することが必要である。図8に当社で開発した3次元人計測技術で、乗車する人と隙間に降りた人(試験的に実施)の3次元位置を計測した結果を示す。この図に示すとおり、乗車する人と隙間に降りた人では、隙間空間で計測された位置が異なることが分かる。
駅ホームでの実地検証
新鵜沼駅(名古屋鉄道)にLiDARを設置し、隙間転落検知の性能を検証した結果について説明する。
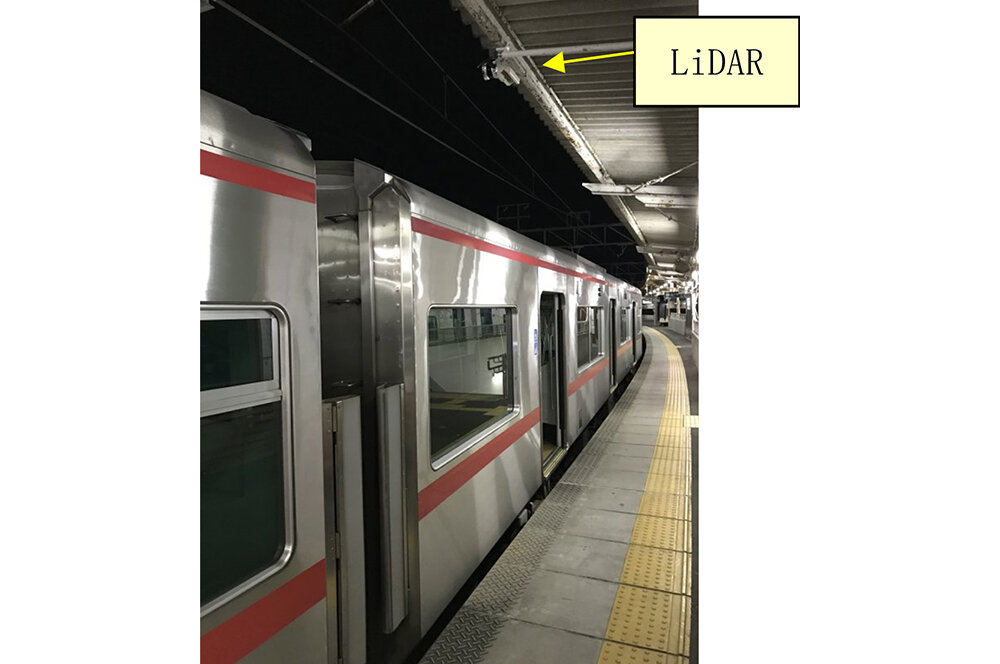
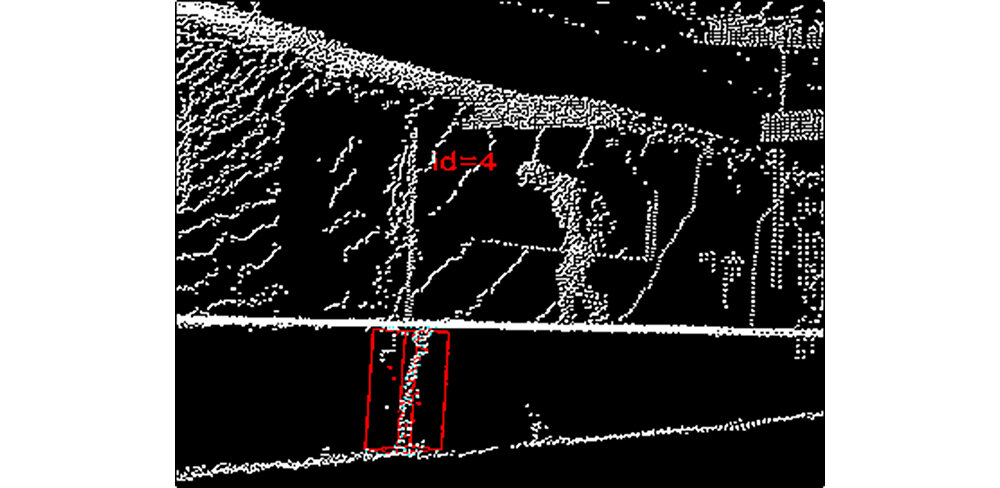
図4で説明したように、LiDARをホーム上約3m高、下向きに設置した(図9)。検知エリア空間は、高次多項式の近似曲線を用いて列車が停止する位置を基準に2車両分の線分とホーム下約1mとして定義した。被験者としては、小学1年生(参考文献7)をモデルにしたダミー人形(子ども人形)を制作し、それを列車の各扉下の隙間に置いて評価した。
図10に、LiDAR点群から子ども人形を検知した結果を示す。評価した位置での隙間は、20cm程度であったが、子ども人形(検知枠内の点群)だけを良好に検出していることが分かる。さらに、検知エリア空間を曲線空間でホーム下のみに定義したことにより、運行時間帯での誤検知を非常に低く抑えることができることも確認した。
今後の取組み
当社では、列車運行の業務変革を目指した「鉄道DXソリューション」の1つとして、3D LiDARを活用した「転落検知サポートシステム」を開発し、名古屋鉄道犬山線2駅で運用していただいている。なお、駅ホームでのRTK-GNSS測位の活用については、研究中であるため、運用システムには適用されていない。
今後は、国土交通省で検討されている自動運転(GoA3、GoA4)(参考文献8)の安全運行支援としてATC/ATSなどと連携可能なセンシング技術の研究開発や支援システムの開発を行っていきたい。
謝辞
「ホームと列車の隙間への転落検知」技術の試験および導入に際し、名古屋鉄道株式会社および名鉄EIエンジニア株式会社の方々には甚大なご支援とご協力をいただき、当社一同、心より感謝を申し上げます。
参考文献
(参考文献1)国土交通省鉄道局:鉄軌道輸送の安全に関わる情報(令和5年度)、2024年
(参考文献2)内閣府:令和7年版交通安全白書、2025年
(参考文献3)土屋陽一、高橋裕之、岩倉隆之、高橋秀也:「AIエッジ」で実現する踏切滞留検知ソリューション、OKIテクニカルレビュー第240号、Vol.89、No.2、pp.12-15、2022年11月
(参考文献4)平本美智代:自動運転を支えるインフラ協調センサー計測技術とV2X通信技術の現状、電気計算3月号、pp.16-22、2024年
(参考文献5)平本美智代、岡本駿志他:技術開発および応用のためのLiDAR(ライダー)関連技術、2025年、情報機構
(参考文献6)大石修平、小林一樹、平本美智代:RTK-GNSSを用いた構造物形状のモデル化と利活用の提案、電子情報通信学会2025年総合大会、2025年
(参考文献7)文部科学省:学校保健統計調査/令和6年度全国表
(参考文献8)国土交通省:鉄道における自動運転技術検討会とりまとめ、「鉄道における自動運転技術検討会」第8回、2022年
筆者紹介
平本美智代:Michiyo Hiramoto. 技術本部先行開発センター センシング先行開発部
内田真広:Masahiro Uchida. クロスインダストリー事業推進センター 基盤開発部
用語解説
- RTK-GNSS測位(real-time kinematic GNSS)
- 基準点からの補正信号を用いて観測点の位置を高精度に測位する方式である。搬送波の整数値アンビギュイティと位相を推定することで、センチオーダーの測位精度を実現している。真の整数値アンビギュイティが決定されたときの解をFIX解、それ以外の場合をFLOAT解と呼ぶ。
- ATC(Automatic Train Control(自動列車制御装置))
- 鉄道における自動運転の安全運行で要求されている列車間の間隔を確保するための装置。
- ATS(Automatic Train Stop(自動列車停止装置))
- 地上から伝送される信号機などの情報を用いて列車を適切な位置に停止するための装置。
